
Dandanes robotika postaja ena najnaprednejših na področju tehnologije. The aplikacije robotike v glavnem sodelujejo v avtomobilih, medicini, gradbeništvu, obrambi in se uporabljajo tudi kot gasilni robot pomagati ljudem iz požarne nesreče. Toda upravljanje robota z daljinskim upravljalnikom ali stikalom je precej zapleteno. Tako je razvit nov projekt, to je robot za upravljanje s kretnjami na merilniku pospeška. Glavni cilj tega projekta je nadzor gibanja robota z ročno kretnjo s pomočjo merilnika pospeška.

Robot za nadzor kretenj na osnovi merilnika pospeška
Robot za nadzor kretenj na osnovi merilnika pospeška
Ta projekt vključuje oddajnik in sprejemnik. The potrebne komponente za gradnjo tega projekta so Ht12e, Ht12d, L293D, AT89S52, 7805, kondenzator, kristal, PBT konektor, enopolna antena, upor, LED, merilnik pospeška in baterija. Merilnik pospeška je bistvena naprava v tem projektu.
Merilnik pospeška ali oddajnik je odvisen od geste roke. Preko oddajne naprave se sprejme ukaz, ki se obdela s pomočjo mikrokrmilnika At89S51. To mikrokrmilnik daje signal robotu, naj se premakne v želeno smer. Osnovno načelo delovanja tega robota je nabor podatkovnih signalov za prenos odčitkov naprav na mikrokrmilnik, nameščen v robotu. Predprogramirani mikrokrmilnik deluje v skladu s programom, zaradi česar robot deluje ustrezno.
Robot, ki je nadzorovan s kretnjami s pomočjo merilnika pospeška, je ena vrsta robota, ki ga je mogoče upravljati s premikanjem roke, tako da nanj postavite merilnik pospeška. Ta projekt je razdeljen na dva dela oddajne in sprejemne naprave. Kjer gesta deluje kot oddajna naprava, robot pa kot sprejemna naprava.
Glavne komponente, uporabljene v oddajnem odseku, vključujejo merilnik pospeška, primerjalnik, dajalnik IC HT12E in RF oddajnik .
Merilec pospeška
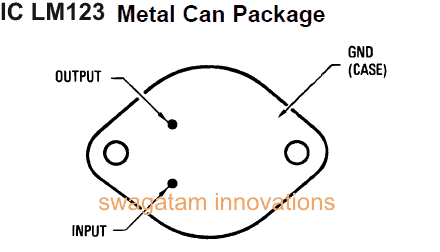
Merilec pospeška je en sam vrsta senzorja in daje analogne podatke med premikanjem v smeri X, Y in Z. Te smeri so odvisne od vrste senzorja. Diagram merilnika pospeška je prikazan spodaj. Ta senzor je sestavljen iz smeri puščic. Če senzor nagnemo v eno smer, se bodo podatki na določenem zatiču spremenili v analogni obliki. Merilec pospeška je sestavljen iz šestih zatičev, pri čemer je funkcijo vsakega zatiča je obravnavano spodaj.

Merilec pospeška
- Pin-1: VDD pin se uporablja za napajanje + 5V na ta pin
- Zatič-2: GND zatič je povezan s tlemi zaradi pristranskosti
- Pin-3: X-pin bo prejemal podatke v smeri X
- Pin-4: Y pin bo prejemal podatke v smeri Y
- Pin-5: Z pin bo prejemal podatke v smeri Z.
- Pin-6: ST-pin se uporablja za nastavitev občutljivosti merilnika pospeška 1,5 g ali 2 g ali 3 g ali 4 g
Primerjalnik
Primerjalnik se uporablja za spreminjanje analogne napetosti v digitalno in primerja to analogno napetost z referenčno napetostjo in daje natančno nizko ali visoko napetost
Dajalnik
Ta kodirnik se uporablja za kodiranje 4-bitnih podatkov in oddaja z uporabo RF oddajnega modula.
RF oddajniški modul
Modul RF TX deluje s frekvenco 433MHz in je ta modul na voljo na trgu z nizkimi stroški
Glavne komponente, ki se uporabljajo v sprejemnem odseku, vključujejo sprejemnik, dekoder, mikrokrmilnik in gonilnik motorja.

Odsek oddajnika
RF sprejemnik
RF sprejemnik tega projekta bo prejel podatke, ki jih prenese oddajna naprava.
Dekodirnik
Dekoder se uporablja za spreminjanje zaporednih podatkov v vzporedne podatke, ki jih prejme RF modul sprejemnika.
Mikrokrmilnik
The mikrokrmilnik je najpomembnejši del robota. Mikrokrmilnik družine 8051 se v vezju uporablja za odločanje
Motorni voznik
Motorni voznik je naprava, ki daje gibanju nalogo, kot je motor. Torej zahtevamo, da jih voznik motorja pusti skozi krmilnik. Vmesnik med motorjem in mikrokrmilnikom je mogoče izvesti z uporabo v tem vezju IC gonilnika motorja L293D.
Na sprejemnem odseku RF-sprejemniški modul sprejema podatke od oddajnika. Prejete podatke lahko dekodira IC IC12D. Prejete podatke lahko obdela mikrokrmilnik AT89S51, gonilnik motorja pa se uporablja za nadzor motorja.

Sprejemnik
Robot za nadzor kretenj deluje
Robot, ki temelji na pospešku, se premika glede na gibanje roke, ko merilnik pospeška položimo na vašo roko. Ko roko z merilnikom pospeška nagnemo pred robota, se začne robot premikati naprej, dokler ne dobimo naslednjega premika. Ko roko nagnemo nazaj, potem robot spremeni smer in stanje. Nato se začne premikati v smeri nazaj, dokler ni dan naslednji signal. Ko roko nagnemo na levo stran, se robot premakne v levo stran, dokler ne dobimo naslednjega signala.
Aplikacije
The uporabe merilnika pospeška robot, ki temelji na kretnjah
- Ti roboti se uporabljajo v vojaških aplikacijah za upravljanje robotov
- Ti roboti se uporabljajo v medicini za namene kirurgije
- Ta robotika se uporablja na področju gradbeništva
- Ta robotika se uporablja v industriji za nadzor vozičkov in dvigal.
Gre torej za robota za upravljanje gibov, ki temelji na merilniku pospeška, za njegovo delovanje in aplikacije. Upamo, da ste bolje razumeli ta koncept. Nadalje, kakršni koli dvomi glede tega koncepta oz elektronski projekti , prosim, dajte svoje povratne informacije s komentarjem v spodnjem oddelku za komentarje Tukaj je vprašanje za vas, kakšne so aplikacije robota za upravljanje s kretnjami na osnovi merilnika pospeška?
Zasluge za fotografije:
- Robot za nadzor kretenj na osnovi merilnika pospeška ytimg
- Merilec pospeška static.flickr







{kind=link}
{kind=link}