Robot za izbiro in postavitev je tisti, ki se uporablja za dvig predmeta in njegovo namestitev na želeno mesto. To je lahko cilindrični robot, ki omogoča gibanje v vodoravni, navpični in rotacijski osi, sferični robot, ki zagotavlja dve rotacijski in eno linearno gibanje, zgibni robot ali robot scara (fiksni roboti s 3 rotacijskimi ročicami z navpičnimi osmi).
Prednosti
Preden se premaknemo naprej, poglejmo nekaj razlogov, zakaj so roboti za izbiro in namestitev prednostni:
- So hitrejši in delo lahko opravijo v nekaj sekundah v primerjavi s človeškimi kolegi.
- So prilagodljivi in imajo ustrezen dizajn.
- So natančni.
- Povečujejo varnost delovnega okolja in se dejansko nikoli ne utrudijo.
Deli robota Pick N Place

Izberite N Place Robot
Poglejmo, kaj dejansko sestavlja robot za izbiro in namestitev:
- Na Rover : Je glavno telo robota, sestavljeno iz več togih teles, kot so valj ali krogla, sklepi in členi. Znan je tudi kot manipulator.
- Končni efektor : To je telo, povezano z zadnjim zgibom roverja, ki se uporablja za prijemanje ali ravnanje s predmeti. Lahko je analogija z roko človeka.
- Pogoni : So vozniki robota. Dejansko sproži robota. Lahko je kateri koli motor, kot je servo motor, koračni motor ali pnevmatski ali hidravlični valj.
- Senzorji: Uporabljajo se za zaznavanje notranjega in zunanjega stanja, da se zagotovi, da robot nemoteno deluje kot celota. Senzorji vključujejo senzorje na dotik, IR senzor itd.
- Krmilnik : Uporablja se za krmiljenje pogonov na podlagi povratne informacije senzorja in s tem nadzor gibanja vsakega zgloba in sčasoma gibanja končnega efektorja.
Delo osnovnega robota Pick N Place:
Osnovna funkcija a izberite in postavite robota naredijo njegovi sklepi. Spoji so analogni človeškim sklepom in se uporabljajo za spajanje obeh zaporednih togih teles v robotu. Lahko so rotacijski ali linearni. Če želimo dodati spoj na katero koli povezavo robota, moramo vedeti o stopnjah svobode in stopnjah gibanja za ta del telesa. Stopinje svobode izvajajo linearno in rotacijsko gibanje telesa, stopnje gibanja pa pomenijo število osi, ki jo telo lahko premika.

Preprost robot N Pick N Place
Preprost robot za izbiro in postavitev je sestavljen iz dveh togih teles na premikajoči se podlagi, povezanih skupaj z vrtljivim zglobom. Vrtljivi zglob je tisti, ki omogoča vrtenje v 360 stopinjah okoli katere koli osi.
- Dno ali podstavek sta pritrjena s kolesi, ki zagotavljajo linearno gibanje.
- 1sttrdo telo je pritrjeno in podpira drugo togo telo, ki mu je namenjen končni efektor.
- 2ndtrdo telo ima gibanje v vseh 3 oseh in ima 3 stopnje svobode. Povezan je z 1sttelo z rotacijskim sklepom.
- Končni efektor mora prilagoditi vseh 6 prostostnih stopenj, da doseže vse strani komponente, da zavzame položaj do poljubne višine.
Na splošno osnovni robot za izbiro in postavitev deluje na naslednji način:
- Kolesa pod podstavkom pomagajo robota premakniti na želeno mesto.
- Togo telo, ki podpira končni efektor, se upogne ali poravna, da doseže položaj, kjer je postavljen predmet.
- Končni efektor z močnim oprijemom dvigne predmet in ga postavi v želeni položaj.
Zdaj, ko imamo kratko predstavo o robotu za izbiro in namestitev, je osnovno vprašanje, kako je dejansko nadzorovan.
Preprost robot za izbiro in namestitev lahko nadzirate z nadzorom gibanja njegovega končnega efektorja. Gibanje je lahko s pomočjo hidravličnega gibanja, tj. Z uporabo hidravlične tekočine pod pritiskom za pogon robota ali s pomočjo pnevmatskega gibanja, tj. Z uporabo zraka pod pritiskom, da povzroči mehansko gibanje. Vendar je najučinkovitejši način uporaba motorjev za zagotavljanje zahtevanega gibanja. Motorji morajo biti krmiljeni, da robotu in končnemu efektorju omogočijo potrebno gibanje.
Delovni primer nadzora robota Pick N Place
Kaj pa nadzor robota z nekaj gumbi na tipkovnici? Da, mogoče je! Samo s pritiskom na zahtevani gumb lahko robotu prenesemo ukaz, da se premakne v katero koli smer, da doseže svojo nalogo. Poleg tega je to mogoče doseči z enostavno brezžično komunikacijo.
Poglejmo, kako to dejansko deluje:
Del oddajnika je sestavljen iz tipkovnice, povezane z mikrokrmilnikom. Katero koli številko gumba v decimalni obliki mikrokrmilnik pretvori v štirimestno binarno datoteko in vzporedni izhod na enem od vrat pristani na kodirnik. Dajalnik pretvori te vzporedne podatke v serijske podatke, ti pa se pošljejo v oddajnik, opremljen z anteno za prenos serijskih podatkov.

Blok diagram prikazuje oddajnik robota Pick N Place
Sprejemna stran je sestavljena iz dekodirnika, ki je povezan z mikrokrmilnikom. Dekoder pretvori prejeti ukaz v serijski obliki v vzporedni obrazec in te podatke posreduje mikrokrmilniku. Na podlagi tega ukaza mikrokrmilnik pošlje ustrezne vhodne signale gonilnikom motorjev za pogon posameznih motorjev.

Blok diagram prikazuje sprejemnik robota Pick N Place
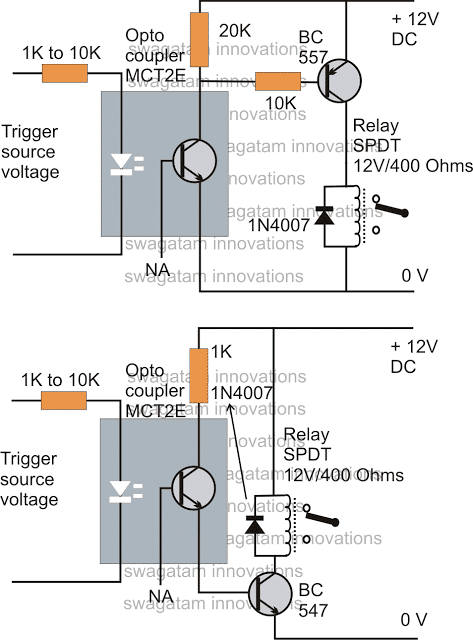
Sistem je sestavljen iz dveh motorjev za gibanje celotnega robota in dveh drugih motorjev za gibanje roke. Končni efektor ali prijemalo je treba nadzorovati, da na predmet pritiska pravilno, da se z njim učinkovito obnese, da se mehak oprijem . To je zagotovljeno z upravljanjem ročnih motorjev z ustreznim ukazom. Izhod iz ročnih motorjev je povezan z uporom 10Ohms / 2W in v času, ko je motor preobremenjen ali zaklenjen, se na uporu razvije visoka napetost, ki povzroči visoko logično raven na izhodu optičnega izolatorja in prekinitvi zatič mikrokrmilnika, priključen na izhod optoizolatorja prek pnp tranzistorja, dobi logično nizek signal, ki ustavi vse druge operacije prijemala.
Tako lahko s preprosto RF komunikacijo dejansko nadzorujemo robota za izbiro in namestitev.
Praktična uporaba robota Pick and Place:
- Obrambne aplikacije : Uporablja se lahko za nadzor in tudi za pobiranje škodljivih predmetov, kot so bombe, in njihovo varno razprševanje.
- Industrijske aplikacije : Ti roboti se uporabljajo v proizvodnji, da poberejo zahtevane dele in jih postavijo v pravilen položaj za dokončanje strojne opreme. Uporablja se lahko tudi za postavitev predmetov na transportni trak, kot tudi za pobiranje izdelkov z transportnega traku.
- Medicinske aplikacije : Ti roboti se lahko uporabljajo pri različnih kirurških operacijah, kot so nadomestne operacije sklepov, ortopedske in interne operacije. Operacije izvaja z večjo natančnostjo in natančnostjo.
Razen teh aplikacij se lahko ti roboti uporabljajo tudi v različnih drugih aplikacijah, primernih za človeštvo.
Zdaj ostaja vprašanje - kako daleč je dan, ko bodo roboti povsem olajšali pot ljudem?