Zelo zanimiva stvar je upravljanje robota, ki uporablja tehnologija daljinskega upravljanja - ali se robot uporablja za zabavne igre usmerjene aplikacije ali za tehnične operacije avtomatizacija doma in industrijske aplikacije (robot za izbiro in namestitev, vrstica, ki sledi robotu , detektor kovin robotsko vozilo, IR nadzorovano robotsko vozilo, robotsko vozilo za gašenje požarov , robotsko vozilo, ki ga upravlja mobilni telefon, vohunski robot z vojaškim poljem z brezžično kamero za nočni vid, robotsko vozilo z glasovnim nadzorom) in tako naprej].
Koraki za izdelavo robotskega telesa in mehanskega sistema na daljinsko upravljanje so zelo zanimivi za ljubitelje električne in elektronike ter študente. Toda v tem članku podajamo podroben in enostaven, korak za korakom opis robota na daljinsko upravljanje. Na splošno je telo robota zasnovano z uporabo koles, kovinskih trakov, kovinske ali plastične plošče, Enosmerni motorji , diskretni sestavni deli, povezovalni vodniki, matice in vijaki.
Tu podani postopni postopki vam bodo pomagali, da boste roko na daljavo sami izdelali na profesionalen način. Naučite se lahko, kako narediti telo robota, kot tudi njegov mehanizem daljinskega upravljanja z dano infografiko . Ta članek zagotovo vsebuje tehnična znanja, potrebna za izdelavo robota na daljinsko upravljanje.
Opomba: Ta infografski robotski daljinski upravljalnik je namenjen izključno študentom tehnike in elektronskim ljubiteljem in ni namenjen komercialnim namenom. (Veljajo določila in pogoji - Ne poskušajte sami izvajati korakov iz tega članka, če ne veste, kako ravnati z električno in elektronska vezja ).
8 korakov za oblikovanje robota na daljinsko upravljanje
1. korak: Spoznajte robotsko aplikacijo in začnite analizirati telo robota
Predvsem morate poznati aplikacijo, za katero boste načrtovali robota na daljinsko upravljanje. Na podlagi aplikacije morate oblikovati telo robota. Tu razpravljamo o tem, kako narediti IR robotsko vozilo na daljinsko upravljanje.
2. korak: Zberite komponente strojne opreme, potrebne za izdelavo telesa robota
Ko se odločite za aplikacijo robota, zberite vse potrebne sestavne dele telesa robota, kot so plastična plošča, kolesa, kovinski trakovi, enosmerni motorji in vse druge komponente, da izdelate telo robota.
3. korak: Zgradite Robotovo telo
Pritrdite zbrane komponente, da oblikujejo telo robota. Kolesa pritrdite s kovinskimi trakovi, enosmernimi motorji in s pohištvom, spajkanjem in lepljenjem zaključite celoten sklop robotskega telesa.
4. korak: Izberite tehnologijo daljinskega upravljanja
Po oblikovanju celotnega telesa robota morate robota nadzorovati s tehniko daljinskega upravljanja. Izberite ustrezno tehnologijo daljinskega upravljanja na podlagi zahteve aplikacije. Za nadzor robota lahko uporabite infrardeči daljinski upravljalnik televizorja ali IR daljinsko upravljanje.
5. korak: Analizirajte in oblikujte vezje daljinskega upravljalnika
Analizirajte komponente, potrebne za načrtovanje vezja daljinskega upravljalnika za nadzor robota z uporabo infrardeče tehnologije. Nato oblikujte vezje in komponente namestite na tiskano vezje, nato pa pravilno spajkajte komponente vezja.
6. korak: Ocenite komunikacijsko tehnologijo za upravljanje na daljavo
Komunikacijski sistem je potreben za daljinsko upravljanje robota. Obstajajo različne vrste komunikacij za načrtovanje sistema za daljinsko upravljanje. Glede na zahteve, kot so domet, do katerega je namenjen daljinski upravljalnik, zahteva glede vidnega polja itd., Morate izbrati ustrezno tehnologijo daljinskega upravljalnika. Uporabite lahko IR tehnologijo daljinskega upravljalnika.
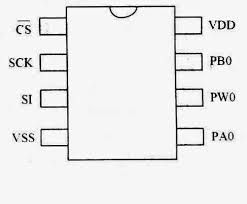
7. korak: Oblikujte IR daljinski upravljalnik
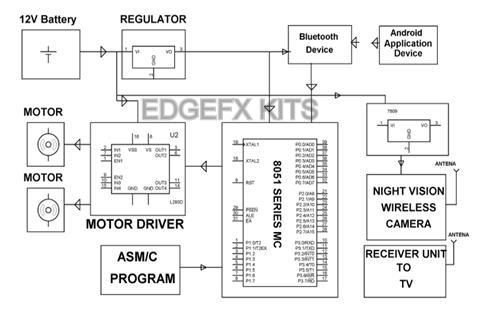
Infrardeči sistem daljinskega upravljanja je sestavljen iz konca oddajnika in konca sprejemnika. Konec oddajnika uporablja krmilnik, konec sprejemnika pa je povezan z robotom.
8. korak: Nadzirajte robota z daljinskim upravljalnikom
Robota lahko daljinsko upravljate s pomočjo tipk IR oddajnika. Ko pritisnete te gumbe, se pošljejo ustrezni ukazi robotskemu sprejemniku za premikanje robota v smeri naprej, nazaj, levo ali desno.

Vdelajte to sliko na svoje spletno mesto (kopiraj kodo spodaj):