
Skoraj vsak mehanični razvoj, ki ga vidimo okoli sebe, doseže električni motor. Električni stroji so metoda pretvorbe energije. Motorji jemljejo električno energijo in proizvajajo mehansko energijo. Elektromotorji se napajajo na stotine naprav, ki jih uporabljamo v vsakdanjem življenju. Elektromotorji so na splošno razvrščeni v dve različni kategoriji: motor z enosmernim tokom (DC) in motor z izmeničnim tokom (AC). V tem članku bomo razpravljali o enosmernem motorju in njegovem delovanju. In tudi kako delujejo enosmerni motorji z zobniki.
Kaj je enosmerni motor?
TO DC motor je električni motor ki deluje na enosmerni tok. V elektromotorju je delovanje odvisno od preprostega elektromagnetizma. Vodnik, ki nosi tok, ustvari magnetno polje, ko se nato postavi v zunanje magnetno polje, bo naletel na silo, sorazmerno s tokom v vodniku in jakostjo zunanjega magnetnega polja. Gre za napravo, ki električno energijo pretvarja v mehansko. Deluje na dejstvo, da vodnik za prenos toka, nameščen v magnetnem polju, doživlja silo, zaradi katere se vrti glede na prvotni položaj. Praktični enosmerni motor je sestavljen iz poljskih navitij, ki zagotavljajo magnetni tok in armaturo, ki deluje kot prevodnik.

Brezkrtačni enosmerni motor
Vnos brezkrtačni enosmerni motor je tok / napetost in njegov izhod je navor. Razumevanje delovanja enosmernega motorja je zelo preprosto, saj je osnovni diagram prikazan spodaj. DC motor je v osnovi sestavljen iz dveh glavnih delov. Vrtljivi del se imenuje rotor, mirujoči del pa tudi stator. Rotor se vrti glede na stator.
Rotor je sestavljen iz navitij, pri čemer so navitja električno povezana s komutatorjem. Geometrija ščetk, kontaktov komutatorja in navitij rotorja je takšna, da se pri uporabi moči polaritete navitja pod napetostjo in statorski magneti poravnajo in rotor se bo obračal, dokler se skoraj ne poravna s poljskimi magneti statorja.
Ko se rotor poravna, se ščetke premaknejo na naslednje kontakte komutatorja in napajajo naslednje navitje. Vrtenje obrne smer toka skozi navitje rotorja, kar povzroči preusmeritev magnetnega polja rotorja, zaradi česar se vrti naprej.
Konstrukcija enosmernega motorja
Konstrukcija enosmernega motorja je prikazana spodaj. Zelo pomembno je, da poznamo njegovo zasnovo, preden vemo, da deluje. Bistveni deli tega motorja vključujejo armaturo in stator.

DC MOTOR
Armaturna tuljava je vrtljivi del, mirujoči del pa stator. Pri tem je armaturna tuljava priključena na enosmerni tok, ki vključuje ščetke in komutatorje. Glavna naloga komutatorja je pretvorba izmeničnega toka v enosmerni tok, ki je induciran v armaturi. Pretok toka lahko dovajamo s pomočjo krtače od vrtljivega dela motorja proti neaktivni zunanji obremenitvi. Armaturo je mogoče razporediti med obema poloma elektromagneta ali trajno.
Enosmerni motorni deli
Pri enosmernih motorjih obstajajo različni priljubljeni modeli motorjev, ki so na voljo kot brezkrtačni trajni magnet, serija, sestavljena rana, ranžirni ali drugače stabilizirani šant. Na splošno so deli enosmernega motorja v teh priljubljenih izvedbah enaki, vendar je celotno delovanje istega. Glavni deli enosmernega motorja vključujejo naslednje.
Stator
Stacionarni del, kot je stator, je eden od delov v delih enosmernega motorja, ki vključuje poljska navitja. Glavna naloga tega je pridobiti oskrbo.
Rotor
Rotor je dinamični del motorja, ki se uporablja za ustvarjanje mehanskih vrtljajev enote.
Krtače
Ščetke s pomočjo komutatorja v glavnem delujejo kot most za pritrditev mirujočega električnega tokokroga proti rotorju.
Komutator
Gre za deljeni obroč, ki je zasnovan z bakrenimi segmenti. Je tudi eden najpomembnejših delov enosmernega motorja.
Field navijanja
Ta navitja so narejena s poljskimi tuljavami, ki so znane kot bakrene žice. Ta navitja zaokrožijo približno reže, ki se prenašajo skozi čevlje.
Navitja armature
Konstrukcija teh navitij v enosmernem motorju je dve vrsti, kot je Lap & Wave.
Jarem
Magnetni okvir, kot je jarem, je včasih izdelan iz litega železa ali jekla. Deluje kot stražar.
Poljaki
Palice v motorju vključujejo dva glavna dela, kot sta jedro droga in čevlji. Ti bistveni deli so med seboj povezani s hidravlično silo in so povezani z jarmom.
Zobje / reža
Neprevodne režne obloge so pogosto zataknjene med stenami rež, kot tudi tuljave za zaščito pred praskami, mehansko oporo in dodatno električno izolacijo. Magnetni material med režami se imenuje zobje.
Ohišje motorja
Ohišje motorja podpira ščetke, ležaje in železno jedro.
Načelo dela
Električni stroj, ki se uporablja za pretvorbo energije iz električne v mehansko, je znan kot enosmerni motor. The Načelo delovanja enosmernega motorja je, da ko se vodnik, ki nosi tok, nahaja znotraj magnetnega polja, potem doživlja mehansko silo. To smer sile je mogoče določiti s Flemmingovim pravilom na levi strani in tudi z njeno velikostjo.
Če je prvi prst iztegnjen, bo drugi prst in palec leve roke navpičen drug na drugega in primarni prst označuje smer magnetnega polja, naslednji prst pomeni trenutno smer, tretji palec palec smer sile, ki jo doživlja vodnik.
F = BIL Newtonov
Kje,
„B“ je gostota magnetnega pretoka,
'Jaz' je aktualen
„L“ je dolžina vodnika v magnetnem polju.
Kadarkoli je navitje armature usmerjeno proti enosmernemu napajanju, bo tok toka nastavljen znotraj navitja. Magnetno polje bodo zagotavljali navitja polja ali trajni magneti. Torej bodo armaturni vodniki izkusili silo zaradi magnetnega polja, ki temelji na zgoraj navedenem principu.
Komutator je zasnovan kot odseki za doseganje enosmernega navora, sicer bi se pot sile prevrnila vsakič, ko se način gibanja vodnika prevrne znotraj magnetnega polja. Torej, to je načelo delovanja enosmernega motorja.
Vrste enosmernih motorjev
V nadaljevanju so obravnavane različne vrste enosmernih motorjev.
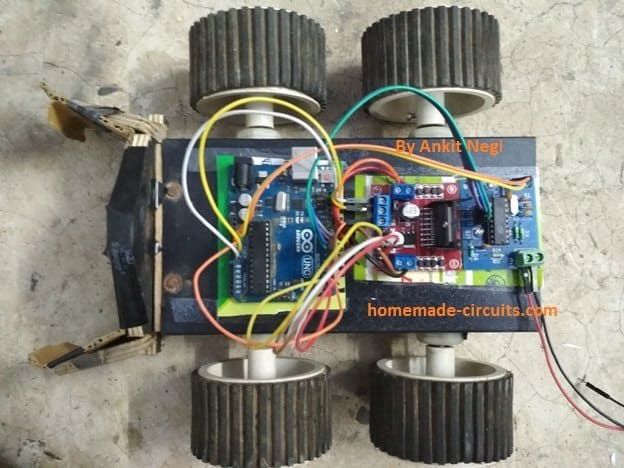
Enosmerni motorji z reduktorjem
Motorji z gonilom ponavadi zmanjšajo hitrost motorja, vendar z ustreznim povečanjem navora. Ta lastnost je priročna, saj se lahko enosmerni motorji vrtijo s hitrostjo prehitro, da bi jo elektronska naprava lahko uporabila. Motorji z gonilom so običajno sestavljeni iz enosmernega motorja s krtačo in menjalnika, pritrjenega na gred. Motorje odlikujejo dve povezani enoti. Zaradi stroškov oblikovanja, zmanjšanja zapletenosti in izdelave aplikacij, kot so industrijska oprema, aktuatorji, medicinsko orodje in robotika, ima veliko aplikacij.
- Nobenega dobrega robota ni mogoče zgraditi brez zobnikov. Glede na to je zelo pomembno dobro razumevanje vpliva prestav na parametre, kot sta navor in hitrost.
- Zobniki delujejo po principu mehanske prednosti. To pomeni, da lahko z uporabo različnih premerov zobnikov izmenjamo hitrost vrtenja in navor. Roboti nimajo zaželenega razmerja med hitrostjo in navorom.
- V robotiki je navor boljši od hitrosti. Z zobniki je mogoče hitrost zamenjati z boljšim navorom. Povečanje navora je obratno sorazmerno z zmanjšanjem hitrosti.

Enosmerni motorji z reduktorjem
Zmanjšanje hitrosti v enosmernem motorju z reduktorjem
Zmanjšanje hitrosti v prestavah vključuje malo prestave, ki poganja večjo prestavo. V reduktorju je lahko malo teh sklopov teh reduktorjev.

Zmanjšanje hitrosti v enosmernem motorju z reduktorjem
Včasih je cilj uporabe zobniškega motorja zmanjšati število vrtljajev gredi motorja v pogonu naprave, na primer v majhni električni uri, kjer se majhen sinhronski motor lahko vrti pri 1.200 vrt./min, vendar se za pogon zmanjša na en vrtljaji sekundni kazalnik in še dodatno zmanjšan v mehanizmu ure za poganjanje minutnih in urnih kazalcev. Tu je količina pogonske sile nepomembna, če zadošča za premagovanje trenja urnega mehanizma.
Serija enosmernih motorjev
Serijski motor je enosmerni motor, pri katerem je navitje polja notranje zaporedno povezano z navitjem armature. Serijski motor zagotavlja visok zagonski navor, vendar ga nikoli ne sme obratovati brez obremenitve in lahko premika zelo velike obremenitve gredi, ko je prvič pod napetostjo. Serijski motorji so znani tudi kot serijsko naviti motorji.
Pri serijskih motorjih so poljska navitja serijsko povezana z armaturo. Jakost polja se spreminja glede na napredovanje toka armature. Takrat, ko se njegova hitrost zmanjša zaradi obremenitve, serijski motor doseže boljši navor. Njegov začetni navor je več kot različne vrste enosmernih motorjev.
Prav tako lahko lažje oddaja toploto, ki se je v navitju nabrala zaradi prenosa velike količine toka. Njegova hitrost se precej premika med polno obremenitvijo in brez obremenitve. Ko se obremenitev odstrani, se hitrost motorja poveča, tok skozi armaturo in poljske tuljave pa se zmanjša. Neobremenjeno delovanje velikih strojev je nevarno.

Serija motorjev
Tok skozi armaturo in poljske tuljave se zmanjša, moč pretočnih linij okoli njih oslabi. Če bi se moč pretočnih vodov okoli tuljav zmanjšala z enako hitrostjo kot tok, ki teče skozi njih, bi se ob
ki se poveča hitrost motorja.
Prednosti
Prednosti serijskega motorja vključujejo naslednje.
- Ogromen začetni navor
- Enostavna gradnja
- Oblikovanje je enostavno
- Vzdrževanje je enostavno
- Stroškovno učinkovito
Aplikacije
Serijski motorji lahko proizvedejo izjemno moč obračanja, navor iz stanja mirovanja. Zaradi te značilnosti so serijski motorji primerni za majhne električne naprave, vsestransko električno opremo itd. Serijski motorji niso primerni, kadar je potrebna stalna hitrost. Razlog je v tem, da se hitrost serijskih motorjev močno spreminja z različnimi obremenitvami.
Shunt Motor
Premični motorji so ranžirni enosmerni motorji, pri katerih so poljska navitja usmerjena na armaturno navitje motorja ali so povezana vzporedno z njimi. Premični enosmerni motor se pogosto uporablja zaradi svoje najboljše regulacije hitrosti. Tako sta navitje armature in navitja polja prikazana na isto napajalno napetost, vendar obstajajo diskretne veje za tok armaturnega toka in poljski tok.
Premični motor ima nekoliko značilne delovne lastnosti kot serijski motor. Ker je tuljava ranžirnega polja izdelana iz fine žice, ne more ustvariti velikega toka za zagon kot serijsko polje. To pomeni, da ima ranžirni motor izredno nizek zagon, zaradi česar mora biti obremenitev gredi precej majhna.

Shunt Motor
Ko na ranžirni motor deluje napetost, skozi ranžirno tuljavo teče zelo majhna količina toka. Armatura za ranžirni motor je podobna serijskemu motorju in bo usmerjal tok, da bo ustvaril močno magnetno polje. Zaradi interakcije magnetnega polja okoli armature in polja, ki nastane okoli ranžirnega polja, se motor začne vrteti.
Tako kot serijski motor, ko se armatura začne obračati, bo ustvaril nazaj EMF. Zadnji EMF bo povzročil, da se tok v armaturi začne zmanjševati na zelo majhno raven. Količina toka, ki jo bo vlekla armatura, je neposredno povezana z velikostjo obremenitve, ko motor doseže polno hitrost. Ker je obremenitev na splošno majhna, bo tok armature majhen.
Prednosti
Prednosti ranžirnega motorja vključujejo naslednje.
- Preprosta zmogljivost upravljanja, kar ima za posledico visoko stopnjo prilagodljivosti za reševanje zapletenih pogonskih težav
- Visoka razpoložljivost, zato je potreben minimalen servisni napor
- Visoka stopnja elektromagnetne združljivosti
- Zelo tekoče delovanje, zato nizka mehanska obremenitev celotnega sistema in visoki dinamični nadzorni procesi
- Širok obseg nadzora in nizke hitrosti, zato univerzalno uporabni
Aplikacije
Električni enosmerni motorji so zelo primerni za uporabo s pasovnim pogonom. Ta motor s konstantno hitrostjo se uporablja v industrijskih in avtomobilskih aplikacijah, kot so obdelovalni stroji in stroji za navijanje / odvijanje, kjer je potrebna velika natančnost navora.
DC sestavljeni motorji
Enosmerni sestavljeni motorji vključujejo ločeno vzburjeno ranžirno polje, ki ima odličen zagonski navor, vendar se sooča s težavami pri aplikacijah s spremenljivo hitrostjo. Polje v teh motorjih je mogoče zaporedno povezati skozi armaturo, pa tudi ranžirno polje, ki je ločeno vzbujeno. Serijsko polje daje izjemen zagonski navor, medtem ko ranžirno polje omogoča izboljšano regulacijo hitrosti. Polje serije pa povzroča težave z upravljanjem v aplikacijah pogonov s spremenljivo hitrostjo in se običajno ne uporablja v pogonih s 4 kvadrantom.
Ločeno navdušen
Kot že ime pove, se navitja polja sicer napajajo iz ločenega enosmernega vira. Edinstveno dejstvo teh motorjev je, da se tok armature ne napaja po celotnih navitjih polja, ker je poljsko navitje ojačano iz ločenega zunanjega vira enosmernega toka. Enačba navora enosmernega motorja je Tg = Ka φ Ia, v tem primeru se navor spremeni s spreminjanjem polnjenega toka „φ“ in neodvisno od toka armature „Ia“.
Samo vznemirjen
Kot že ime pove, se lahko pri tej vrsti motorja tok znotraj navitij napaja skozi motor, sicer pa sam stroj. Nadalje je ta motor ločen na serijsko navit in navit motor.
Enosmerni motor s trajnim magnetom
Enosmerni motor PMDC ali trajni magnet vključuje navitje armature. Ti motorji so zasnovani s trajnimi magneti, tako da jih postavijo na notranji rob jedra statorja za ustvarjanje poljskega toka. Po drugi strani pa rotor vključuje običajno enosmerno armaturo, vključno s ščetkami in segmenti komutatorja.
V enosmernem motorju s trajnim magnetom lahko magnetno polje nastane skozi trajni magnet. Torej se vhodni tok ne uporablja za vzbujanje, ki se uporablja v klimatskih napravah, brisalcih, avtomobilskih zaganjačih itd.
Priključitev enosmernega motorja z mikrokrmilnikom
Mikrokrmilniki ne morejo neposredno poganjati motorjev. Torej potrebujemo nekakšnega voznika za nadzor hitrosti in smeri motorjev. Vozniki motorjev bodo med seboj delovali kot povezovalne naprave mikrokrmilniki in motorji . Vozniki motorjev bodo delovali kot ojačevalniki toka, saj sprejmejo krmilni signal nizkega toka in oddajajo signal visokega toka. Ta visokotokovni signal se uporablja za pogon motorjev. Uporaba čipa L293D je enostaven način za upravljanje motorja z mikrokrmilnikom. Vsebuje dva vezja gonilnikov mostu H.
Ta čip je zasnovan za nadzor dveh motorjev. L293D ima dva sklopa ureditev, pri katerih ima 1 komplet vhod 1, vhod 2, izhod1, izhod 2, z omogočnim zatičem, medtem ko ima drugi niz vhod 3, vhod 4, izhod 3, izhod 4 z drugim vtičem za omogočanje. Tukaj je video, povezan z L293D
Tu je primer enosmernega motorja, ki je povezan z mikrokrmilnikom L293D.

Enosmerni motor povezan z mikrokrmilnikom L293D
L293D ima dva sklopa ureditev, pri katerih ima en niz vhod 1, vhod 2, izhod 1 in izhod 2, drugi sklop pa vhod 3, vhod 4, izhod 3 in izhod 4, v skladu z zgornjim diagramom,
- Če so nožice št. 2 in 7 visoke, so tudi nožke št. 3 in 6 visoke. Če sta omogočeni 1 in zatič številka 2 visoki, zatič številka 7 pa tako nizko, se motor vrti v smeri naprej.
- Če sta omogočeni 1 in številka 7 visoka, zatič številka 2 pa tako nizko, se motor vrti v obratni smeri.
Danes enosmerne motorje še vedno najdemo v mnogih aplikacijah, tako majhnih kot igrače in diskovni pogoni, ali v velikih velikostih za upravljanje valjarn jekla in strojev za papir.
Enačbe enosmernega motorja
Velikost pretoka je
F = BlI
Kje, B- gostota pretoka zaradi pretoka, ki ga povzročajo navitja polja
l- Aktivna dolžina vodnika
I-tok, ki prehaja skozi vodnik
Ko se vodnik vrti, se inducira EMR, ki deluje v smeri, nasprotni dovedeni napetosti. Podana je kot

Kje, Ø- Fluz zaradi navitij polja
P- Število polov
A-A konstanta
N - hitrost motorja
Z- Število vodnikov
Napajalna napetost, V = Eb+ JazdoRdo
Razviti navor je
 Tako je navor neposredno sorazmeren s tokom armature.
Tako je navor neposredno sorazmeren s tokom armature.
Hitrost se spreminja tudi s tokom armature, zato sta posredno navor in hitrost motorja odvisna drug od drugega.
Pri enosmernem ranžirnem motorju ostane hitrost skoraj nespremenjena, tudi če se navor poveča od bremena do polne obremenitve.
Pri motorju z enosmernim tokom se hitrost zmanjšuje, ko se navor poveča od bremena do polne obremenitve.
Tako lahko navor nadzirate s spreminjanjem hitrosti. Nadzor hitrosti dosežemo z
- Spreminjanje pretoka z nadzorovanjem toka skozi navitje polja - metoda nadzora pretoka. S to metodo se hitrost nadzira nad nazivno hitrostjo.
- Nadzor napetosti armature - Omogoča nadzor hitrosti pod normalno hitrostjo.
- Nadzor napajalne napetosti - omogoča nadzor hitrosti v obe smeri.
4 Delovanje kvadranta
Na splošno lahko motor deluje v 4 različnih regijah. The delovanje štirih kvadrantov enosmernega motorja vključuje naslednje.
- Kot motor v smeri naprej ali v smeri urnega kazalca.
- Kot generator v smeri naprej.
- Kot motor v vzvratni ali nasprotni smeri urnega kazalca.
- Kot generator v obratni smeri.

4 Delovanje kvadranta enosmernega motorja
- V prvem kvadrantu motor vozi tovor s hitrostjo in navorom v pozitivno smer.
- V drugem kvadrantu se smer navora obrne in motor deluje kot generator
- V tretjem kvadrantu motor poganja tovor s hitrostjo in navorom v negativni smeri.
- V četrtemthkvadrant, motor deluje kot generator v vzvratnem načinu.
- V prvem in tretjem kvadrantu motor deluje v smeri naprej in nazaj. Na primer, motorji v dvigalih za dvigovanje tovora in njegovo odlaganje.
V drugem in četrtem kvadrantu motor deluje kot generator v smeri naprej in nazaj in zagotavlja energijo nazaj v vir energije. Tako je način upravljanja motorja, da deluje v katerem koli od štirih kvadrantov, nadzor nad njegovo hitrostjo in smerjo vrtenja.
Hitrost se uravnava s spreminjanjem napetosti armature ali z oslabitvijo polja. Smer vrtilnega momenta ali smer vrtenja se nadzoruje s spreminjanjem obsega, v katerem je uporabljena napetost večja ali manjša od zadnje emf.
Pogoste napake pri enosmernih motorjih
Pomembno je vedeti in razumeti okvare in napake motorja, da opišemo najprimernejše varnostne naprave za vsak primer. Obstajajo tri vrste okvar motorja, kot so mehanske, električne in mehanske, ki prerastejo v električne. Najpogostejše napake vključujejo naslednje,
- Razčlenitev izolacije
- Pregrevanje
- Preobremenitve
- Okvara ležaja
- Vibracije
- Zaklenjen rotor
- Neskladje gredi
- Povratni tek
- Neravnovesje faze
Najpogostejše napake, ki se pojavijo pri motorjih z izmeničnim tokom, pa tudi pri enosmernih motorjih, vključujejo naslednje.
- Ko motor ni pravilno nameščen
- Ko je motor blokiran zaradi umazanije
- Ko motor vsebuje vodo
- Ko se motor pregreje
12 V DC motor
12v enosmerni motor je poceni, majhen in zmogljiv, ki se uporablja v več aplikacijah. Izbira primernega enosmernega motorja za določeno aplikacijo je zahtevna naloga, zato je zelo pomembno, da delate v natančnem podjetju. Najboljši primer teh motorjev so METMotors, saj že več kot 45 let izdelujejo visokokakovostne PMDC (DC magnet).
Kako izbrati pravi motor?
Izbiro 12v enosmernega motorja je mogoče zelo enostavno opraviti prek METmotors, saj bodo strokovnjaki tega podjetja najprej preučili vašo pravilno uporabo, nato pa bodo upoštevali številne značilnosti in specifikacije, da vam bodo zagotovili čim boljši izdelek.
Delovna napetost je ena od značilnosti tega motorja.
Ko se motor napaja z baterijami, se običajno izberejo nizke delovne napetosti, saj je za dosego določene napetosti potrebno manj celic. Toda pri visokih napetostih je pogon enosmernega motorja običajno bolj učinkovit. Kljub temu je njegovo delovanje mogoče doseči z 1,5 volti do 100 V. Najpogosteje uporabljeni motorji so 6v, 12v in 24v. Druge glavne specifikacije tega motorja so hitrost, delovni tok, moč in navor.
12V enosmerni motorji so kot nalašč za različne aplikacije z enosmernim napajanjem, ki zahteva tekoči navor in visok zagon. Ti motorji delujejo pri manj hitrostih v primerjavi z drugimi napetostmi motorja.
Značilnosti tega motorja se v glavnem razlikujejo glede na proizvodno podjetje in uporabo.
- Hitrost motorja je od 350 vrt / min do 5000 vrt / min
- Nazivni navor tega motorja znaša od 1,1 do 12,0 lb
- Izhodna moč tega motorja je od 01hp do 21 hp
- Velikosti okvirja so 60 mm, 80 mm, 108 mm
- Zamenljive ščetke
- Običajna življenjska doba čopiča je 2000+ ur
Nazaj EMF v enosmernem motorju
Ko je prevodnik, ki nosi tok, razporejen v magnetno polje, se bo navor sprožil nad vodnikom in navor bo zasukal prevodnik, ki reže tok magnetnega polja. Na podlagi pojava elektromagnetne indukcije, ko prevodnik prereže magnetno polje, nato pa bo EMF sprožil znotraj vodnika.
Smer inducirane EMF lahko določimo s Flemmingovim pravilom desne roke. V skladu s tem pravilom, če s sličico, kazalcem in osrednjim prstom primemo kot 90 ° pod kotom, bo kazalec pokazal pot magnetnega polja. Tu palčni prst predstavlja vodnikov način gibanja, srednji pa označuje inducirano EMF nad vodnikom.
Z uporabo Flemmingovega desnega pravila lahko opazimo, da je inducirana smer EMS obratna na uporabljeno napetost. Torej se emf imenuje zadnji emf ali nasprotni emf. Razvoj zadnje EMF lahko izvedemo zaporedno z uporabljeno napetostjo, vendar obratno v smeri, to pomeni, da se zadnja EMF upira toku toka, ki ga povzroči.
Velikost zadnje emf je mogoče podati s podobnim izrazom, kot je naslednji.
Eb = NP ϕZ / 60A
Kje
„Eb“ je EMF, ki ga povzroča motor, imenovan Back EMF
„A“ je št. vzporednih pasov skozi armaturo med krtačami za obratno polarnost
„P“ je št. polov
'N' je hitrost
‘Z’ je celotno število vodnikov v armaturi
'Φ' je koristen tok za vsak pol.
V zgornjem vezju je velikost zadnje emf vedno majhna v primerjavi z uporabljeno napetostjo. Razlika med obema je skoraj enakovredna, ko enosmerni motor deluje pod običajnimi pogoji. Tok bo na glavnem napajalniku induciral enosmerni motor. Razmerje med glavnim napajalnim, povratnim EMF in tokom armature lahko izrazimo kot Eb = V - IaRa.
Aplikacija za nadzor delovanja enosmernega motorja v 4 kvadrantih
Nadzor delovanja enosmernega motorja v 4 kvadrantih je mogoče doseči z mikrokrmilnikom, povezanim s 7 stikali.

4 Nadzor kvadranta
Primer 1: Ko pritisnete stikalo za zagon in smer v smeri urnega kazalca, daje logika v mikrokrmilniku izhodno vrednost logike nizko na pin 7 in logiko visoko na pin2, zaradi česar se motor vrti v smeri urinega kazalca in deluje v položaju 1stkvadrant. Hitrost motorja lahko spreminjate s pritiskom na stikalo PWM, kar povzroči uporabo impulzov različnega trajanja na omogočevalni zatič gonilne IC, s čimer se spreminja uporabljena napetost.
Primer 2: Ko pritisnete sprednjo zavoro, logika mikrokrmilnika uporabi logiko nizko na pin7 in logiko visoko na pin 2 in motor ponavadi deluje v obratni smeri, zaradi česar se takoj ustavi.
Na podoben način pritisk stikala v nasprotni smeri urnega kazalca povzroči, da se motor premika v obratni smeri, torej deluje v položaju 3rdče pritisnete stikalo za vzvratno zavoro, se motor takoj ustavi.
Tako lahko s pravilnim programiranjem mikrokrmilnika in s stikali upravljate delovanje motorja v vsako smer.
Tu gre torej za pregled enosmernega motorja. The prednosti enosmernega motorja ali zagotavljajo odličen nadzor hitrosti za pospeševanje in pojemanje, enostavno razumljivo zasnovo in preprosto, poceni zasnovo pogona. Tukaj je vprašanje za vas, kakšne so pomanjkljivosti enosmernega motorja?
Zasluge za fotografije:
- Brezkrtačni enosmerni motorji delajo novice.softpedia
- 4 Kvadrant Delovanje enosmernega motorja do lh5.ggpht
- Enosmerni motor z reduktorjem wikimedia
- Shunt Motor by območju




{kind=link}
{kind=link}
{kind=link}
{kind=link}