A servomotor deluje kot rotacijski aktuator, ki se uporablja predvsem za spreminjanje električnega vhoda v mehanski pospešek. Ta motor deluje na podlagi servomehanizma, kjer koli se povratna informacija o položaju uporablja za nadzor hitrosti in končne lokacije motorja. Servo motorji se vrtijo in dobijo določen kot na podlagi uporabljenega vnosa. Servo motorji so majhni, vendar so energetsko zelo učinkoviti. Ti motorji so razvrščeni v dve vrsti, kot sta servomotor na izmenični tok in servomotor na enosmerni tok, vendar je glavna razlika med tema dvema motorjema vir uporabljene energije. Predstava a DC servo motor v glavnem je odvisen le od napetosti, medtem ko je AC servo motor odvisen od napetosti in frekvence. Ta članek obravnava eno od vrst servo motorjev - an AC servo motor – delo z aplikacijami.
Kaj je AC servo motor?
Tip servomotorja, ki ustvarja mehansko moč z uporabo električnega vhoda izmeničnega toka v natančni obliki kotne hitrosti, se imenuje servo motor izmeničnega toka. Izhodna moč tega servomotorja se v glavnem giblje od vatov do nekaj 100 vatov. Delovna frekvenca AC servo motorja se giblje od 50 do 400 Hz. Diagram AC servo motorja je prikazan spodaj.

Glavne značilnosti servo motorjev na izmenični tok vključujejo predvsem; to so naprave z manjšo težo, ki zagotavljajo stabilnost in zanesljivost med delovanjem, med delovanjem se ne ustvarja hrup, zagotavljajo linearne karakteristike navora in hitrosti ter zmanjšajo stroške vzdrževanja, ko drsni obroči in ščetke niso prisotni.
Za več informacij obiščite to povezavo Vrste AC servo motorjev
Konstrukcija AC servo motorja
Na splošno je AC servo motor dvofazni indukcijski motor. Ta motor je izdelan z uporabo statorja in a rotor kot običajen indukcijski motor. Na splošno ima stator tega servo motorja laminirano strukturo. Ta stator vključuje dve navitji, ki sta v prostoru postavljeni za 90 stopinj drug od drugega. Zaradi te fazne spremembe nastane rotacijsko magnetno polje.

Prvo navitje je znano kot glavno navitje ali tudi kot fiksno fazno ali referenčno navitje. Tu se glavno navitje aktivira iz napajalnega vira s konstantno napetostjo, medtem ko se drugo navitje, kot je krmilno navitje ali krmilna faza, aktivira s spremenljivo krmilno napetostjo. Ta krmilna napetost se preprosto napaja iz servo ojačevalnika.

Na splošno je rotor na voljo v dveh vrstah: veveričja kletka in vlečna skodelica. Rotor, ki se uporablja v tem motorju, je običajni kletkasti rotor, vključno z aluminijastimi palicami, pritrjenimi v reže in kratko povezanimi s končnimi obroči. Zračna reža je minimalna za največjo povezavo toka. Druga vrsta rotorja, kot je vlečna skodelica, se uporablja predvsem tam, kjer je vztrajnost vrtljivega sistema nizka. To torej pomaga pri zmanjševanju porabe energije.
Načelo delovanja AC servomotorja
Načelo delovanja servo motorja izmeničnega toka je; najprej je konstantna izmenična napetost podana na glavnem navitju zaganjalnika servomotorja, drug priključek statorja pa je preprosto povezan s krmilnim transformatorjem v celotnem krmilnem navitju. Zaradi uporabljene referenčne napetosti se bo gred sinhronskega generatorja vrtela z določeno hitrostjo in dosegla določen kotni položaj.

Poleg tega ima gred krmilnega transformatorja poseben kotni položaj, ki se primerja s kotno točko gredi sinhronskega generatorja. Tako bo primerjava dveh kotnih položajev zagotovila signal napake. Natančneje, ovrednotijo se nivoji napetosti za enakovredne položaje gredi, kar povzroči signal napake. Torej ta signal napake komunicira s trenutno napetostjo na krmilnem transformatorju. Nato se ta signal pošlje servo ojačevalniku, tako da ustvari neenakomerno krmilno napetost.
S to uporabljeno napetostjo rotor ponovno doseže določeno hitrost, se začne vrteti in vzdržuje, dokler vrednost signala napake ne doseže nič, tako da doseže želeni položaj motorja znotraj AC servomotorjev.
Prenosna funkcija AC servo motorja
Prenosno funkcijo servo motorja na izmenični tok lahko definiramo kot razmerje med L.T (Laplaceova transformacija) izhodne spremenljivke in L.T (Laplaceova transformacija) vhodne spremenljivke. Torej je matematični model tisti, ki izraža diferencialno enačbo, ki pove o/p do i/p sistema.
Če je T.F. (prenosna funkcija) katerega koli sistema, potem je mogoče izračunati izhodni odziv za različne vrste vhodov, da se prepozna narava sistema. Podobno, če prenosna funkcija (T.F) ni znana, jo je mogoče eksperimentalno najti s preprosto uporabo znanih vhodov v napravi in preučevanjem izhoda sistema.
AC servo motor je dvofazni indukcijski motor, kar pomeni, da ima dve navitji, kot sta krmilno navitje (glavno navitje) in referenčno navitje (razburljivo navitje).

Zato moramo ugotoviti prenosno funkcijo servo motorja izmeničnega toka, tj. θ(s)/ec(s). Tu je 'θ(s)/' izhod sistema, medtem ko je ex(s) vhod sistema.
Da bi ugotovili prenosno funkcijo motorja, moramo ugotoviti, kakšen navor razvije motor 'Tm' in navor, ki ga razvije obremenitev 'Tl'. Če izenačimo stanje ravnovesja kot
Tm = Tl, potem lahko dobimo prenosno funkcijo.
Naj bo Tm = navor, ki ga razvije motor.
Tl = navor, ki ga razvije obremenitev ali navor obremenitve.
„θ“ = kotni premik.
'ω' = d θ/dt = kotna hitrost.
„J“ = vztrajnostni moment bremena.
'B' je merilna točka obremenitve.
Tukaj sta dve konstanti, ki ju je treba upoštevati, K1 in K2.
„K1“ je naklon krmilne fazne napetosti glede na karakteristike navora.
„K2“ je naklon značilnosti vrtilnega momenta.
Tukaj je navor, ki ga razvije motor, preprosto označen z
Tm = K1ec- K2 dθ/dt —–(1)
Navor obremenitve (TL) je mogoče modelirati z upoštevanjem enačbe ravnotežja navora.
Uporabljeni navor = nasprotni navor zaradi J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
Vemo, da je pogoj ravnovesja Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Na zgornjo enačbo uporabite enačbo Laplaceove transformacije
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/ S [B + JS + K2]
= K1/ S [B + K2 + JS]
= K1/ S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
Kjer je Km = K1/ B + K2 = konstanta ojačanja motorja.
Tm = J/ B + K2 = časovna konstanta motorja.
Metode nadzora hitrosti AC servo motorja
Na splošno servo motorji imajo tri načine nadzora, kot so nadzor položaja, nadzor navora in nadzor hitrosti.
Metoda nadzora položaja se uporablja za določanje velikosti vrtilne hitrosti v zunanjih vhodnih frekvenčnih signalih. Kot vrtenja je določen s št. stročnic. Položaj in hitrost servo motorja je mogoče neposredno dodeliti prek komunikacije. Ker ima lahko položaj metode izjemno strog nadzor nad položajem in hitrostjo, se običajno uporablja v aplikaciji za določanje položaja.
Pri metodi krmiljenja navora se izhodni navor servo motorja nastavi z analognim vhodom na naslovu. Lahko spremeni navor s preprosto spremembo analognega v realnem času. Poleg tega lahko prek komunikacije spremeni tudi vrednost na relativnem naslovu.
V načinu krmiljenja hitrosti je mogoče hitrost motorja krmiliti z analognim vhodom in impulzom. Če obstajajo zahteve glede natančnosti in ni skrbi glede tolikšnega navora, je način hitrosti boljši.
Značilnosti AC servo motorja
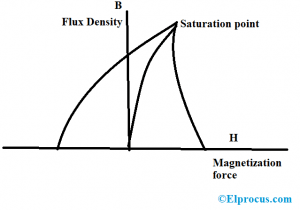
Značilnosti vrtilne hitrosti servo motorja na izmenični tok so prikazane spodaj. V naslednjih značilnostih se navor spreminja s hitrostjo, vendar ne linearno, ker je v glavnem odvisen od razmerja reaktanse (X) in odpornost (R). Nizka vrednost tega razmerja pomeni, da ima motor visok upor in nizko reaktanco; v takih primerih so karakteristike motorja bolj linearne kot visoka vrednost razmerja za reaktanco (X) proti uporu (R).

Prednosti
Prednosti AC servo motorjev vključujejo naslednje.
- Lastnosti krmiljenja hitrosti tega motorja so dobre.
- Proizvajajo manj toplote.
- Ponujajo visoko učinkovitost, večji navor na težo, zanesljivost in zmanjšan RF šum.
- Potrebujejo manj vzdrževanja.
- V neobstoju komutatorja imajo daljšo pričakovano življenjsko dobo.
- Ti motorji so sposobni obvladovati višje tokovne udare v industrijskih strojih.
- Pri visokih vrtljajih ponujajo bolj konstanten navor.
- Ti so zelo zanesljivi.
- Zagotavljajo visoko hitrost delovanja.
- Ti so zelo primerni za aplikacije z nestabilno obremenitvijo.
Pomanjkljivosti AC servo motorjev vključujejo naslednje.
- Krmiljenje AC servo motorja je težje.
- Ti motorji se lahko pokvarijo zaradi stalne preobremenitve.
- Menjalniki so pogosto potrebni za prenos moči pri visokih hitrostih.
Aplikacije
Uporaba AC servo motorjev vključuje naslednje.
- AC servo motorji so uporabni, kjer je regulacija položaja pomembna in jih običajno najdemo v polprevodniških napravah, robotih, letalih in obdelovalnih strojih.
- Ti motorji se uporabljajo v instrumentih, ki delujejo na servomehanizmu kot v računalnikih in napravah za nadzor položaja.
- AC servo motor se uporablja v obdelovalnih strojih, robotskih strojih in sistemih za sledenje.
- Ti servo motorji se zaradi svoje učinkovitosti in vsestranskosti uporabljajo v različnih panogah.
- AC servo motor se uporablja v večini običajnih strojev in naprav, kot so grelniki vode, pečice, črpalke, terenska vozila, vrtna oprema itd.
- Veliko naprav in orodij, ki se vsak dan uporabljajo v hiši, poganjajo AC servo motorji.
Tako je to pregled ak servo motorji - delujejo z aplikacijami. Ti motorji se uporabljajo v številnih aplikacijah, kot so instrumenti, ki delujejo na servomehanizmu, pa tudi strojna orodja, sistemi za sledenje in robotika. Tukaj je vprašanje za vas, kaj je indukcijski motor?