V tem prispevku bomo razpravljali o osnovah sestavljanja telesa quadcopterja z uporabo aluminijastih cevi in vijakov, v kasnejših odsekih članka pa tudi o preprostem vezju drona, ki bi ga lahko uporabili za letenje majhnega sklopa drona, ne glede na zapletene mikrokrmilnike.
Quadcopter je morda najpreprostejši leteči stroj, ki zahteva minimalno aerodinamično natančnost in zaplete, zato ni presenetljivo, da bi lahko pridobil izjemno priljubljenost med različnimi hobiji, ki bi to lahko uspešno izdelali .... stroj, s katerim bi lahko dejansko leteli in nadzor po lastni volji.
Quadcopter Dynamics
Dejstvo, da je brezpilotni dron quadcopter glede tehničnosti in dinamike najpreprostejši, je pravzaprav posledica sodelovanja 4 propelerjev in uravnotežene strukture okvirja, ki omogočajo stroju letenje s sorazmerno dobrim ravnotežjem tudi v težkih podnebnih razmerah.
Toda preprostost tudi pomeni, da sistem morda ni tako učinkovit kot običajni modeli letal in helikopterjev, ki so zapleteno zasnovani tako, da kažejo izjemno učinkovitost glede hitrosti in porabe goriva ter seveda nosilnosti ... vse to bi lahko bilo v bistvu pomanjkanje tipičnega sistema quadcopter.
Kar zadeva hobi projekt, pa ta stroj postane idealna izbira za večino navdušencev, ki se jim zdi zelo zabavno in zanimivo izdelati lasten leteči stroj doma, ki na koncu 'posluša' in leti v katero koli smer. uporabnik se raje premika.
Vendar se lahko za novega igralca, ki je tehnično neobveščen, celo ta preprost stroj zdi zelo zapleten za razumevanje, preprosto zato, ker večina s tem povezanih informacij, predstavljenih na številnih spletnih mestih, koncepta ne razloži lucidno in v 'jeziku', ki morda ustreza laikom.
Ta članek je bil posebej napisan za tiste ne preveč tehnične ljudi, ki jih zanima izdelava čudovitega letečega stroja, vendar se jim zdi zadeva pretežka za prebavo.
Zakaj je Quadcopter danes tako enostavno graditi
Ste se kdaj vprašali, zakaj je kvadrokopterje in brezpilotne letale v današnjem svetu tako enostavno izdelati, prej pa morda ni bilo mogoče uporabljati električne energije?
V bistvu je to posledica razvoja in izboljšanja Li-Ion baterij. To so danes izjemno učinkovite baterije, ki ponujajo impresivno razmerje med močjo in težo. Skupaj s tem je izum BLDC motorjev in visoko dodelanih motorjev s trajnimi magneti prispeval tudi k lažji izdelavi brezpilotnih letal.
Li-Ion baterija je sposobna zagotoviti neverjeten navor vrtilnega momenta na motorjih, kar postane dovolj, da enoto kvadrokopterja v nekaj sekundah potisne na visoko nadmorsko višino in ji omogoča, da dolgo časa ostane v zraku. uspešnost zelo učinkovita in uporabna.
Kako leti Quadcopter
Zdaj pa skočimo pravilno in razumemo, katere bistvene stvari so potrebne za uspešno letenje quadcopterja. Tu so osnove za uspešno nemoteno letenje stroja:


1) V bistvu stroj zahteva trdno in močno telo, vendar izjemno majhne teže. To bi lahko izdelali ali sestavili z uporabo votlih kvadratnih aluminijastih ekstruzijskih cevi z ustreznim vrtanjem lukenj in pritrditvijo okvirja z maticami in vijaki.
2) Konstrukcija mora biti v obliki popolnega znaka „+“ ali popolnega znaka „x“, saj ne bo pomembna, če bo kot med „prehodnimi“ cevmi po 90 stopinj.

Osnovni elementi, potrebni za izdelavo kvadrokopterja, so prikazani na naslednji sliki:

Simulacija dela
Spodnja groba animirana simulacija prikazuje, kako zgoraj prikazane elemente sestaviti skupaj:

Kako zgraditi ogrodje Quadcopter
Aluminij za okvir '+' je mogoče dobiti z ustreznim rezanjem in dimenzioniranjem že izdelanih aluminijastih cevi za iztiskanje, kot je prikazano spodaj:

Velikost okvirja je relativna in zato ni ključnega pomena, lahko z močno razmaknjenimi motorji zgradite širok okvir ali zgradite precej kompaktno strukturo okvirja, kjer motorji niso preširoko narazen ... čeprav je treba zagotoviti, da propelerji so med seboj dobro oddaljeni, da omogočajo boljše ravnotežje in ravnotežje.
3) Struktura okvirja '+' mora biti opremljena s kvadratno ploščadjo na osrednjem delu, kjer se kraki okvirja stikata in križata. Lahko gre za dobro polirano aluminijasto ploščo, ki je primerno dimenzionirana za udobno namestitev vse potrebne elektronike in ožičenja.
Tako je ta osrednja plošča ali platforma v bistvu potrebna za namestitev in namestitev elektronike sistema, ki bi bila na koncu odgovorna za nadzor vašega kvadrokopterja.
4) Ko je zgornji okvir dokončan, morajo biti motorji pritrjeni čez konce prečk, kot je prikazano na zgornjih slikah.
5) Ni treba posebej poudarjati, da je treba vsa vgradna dela opraviti z največjo natančnostjo in popolno poravnavo, za to bo morda potrebno združenje izkušenega izdelovalca.
Ker je vse v zasnovi v parih, natančna poravnava elementov pravzaprav ne bo pretežka, gre le za dimenzioniranje in namestitev parov s čim več podobnosti, kar bo posledično zagotovilo največjo raven ravnovesja, ravnotežja in sinhronizacije za sistem.
Ko je okvir zgrajen, je čas, da se elektronska vezja integrirajo z ustreznimi motorji. To je treba storiti v skladu z navodili v danem priročniku za vezje.
Vezja lahko namestite na spodnjo stran osrednje plošče z ustreznim ohišjem ali čez ploščo, spet z ustrezno omarico, ki jo tesno zapre.

Razumevanje smeri vrtenja propelerjev
Analiza smeri vrtenja motornih propelerjev za uravnotežen dvig:
Glede na zgornjo animirano simulacijo je treba smer vrtenja propelerjev motorja poravnati na naslednji način:
Preprosto mora biti tak, da morajo biti motorji na koncih ene palice enaki, vendar drugačni od smeri motorja druge palice, kar pomeni, da če ima ena palica motorje, ki se vrtijo v smeri urinega kazalca, potem pa motorji na koncih druge komplementarne palica mora biti nastavljena tako, da se vrti v nasprotni smeri urnega kazalca. smer.
Glejte zgornjo simulacijo, da boste pravilno razumeli gibanje motorjev, ki deluje v nasprotni smeri, ki bo morda potrebno, da se dodeli motorjem, da se zagotovi uravnotežen zagon motorja.
Kako nadzirati smer kvadrokopterja z nadzorom hitrosti motorjev.
Da, smer letenja quadcopterja lahko prilagodite in nadzirate po lastni želji in volji s preprosto uporabo različnih hitrosti (RPM) na zadevnih motorjih.
Naslednje slike prikazujejo, kako lahko osnovni prenos hitrosti uporabimo na ustreznih motorjih, da dosežemo in izvedemo katero koli želeno smer letenja do stroja:




Kot je navedeno v zgornjih diagramih, lahko quadcopter z ustreznim zmanjšanjem hitrosti določenega sklopa motorjev ali povečanjem hitrosti nasprotnega sklopa motorjev ali prilagajanjem hitrosti glede na lastne želje potuje po zraku v katerem koli želeno določeno smer.
Zgornje slike prikazujejo osnovne smeri, kot so naprej, nazaj, desno, levo itd ... vendar je mogoče katero koli drugo nenavadno smer tudi učinkovito izvajati s primernim prilagajanjem hitrosti ustreznih motorjev ali pa je to lahko samo en motor.
Na primer, da sili stroj leteti v smeri N / W, se lahko poveča hitrost samo S / E motorja, za omogočanje letenja v smeri N / E pa hitrost S / W motor se lahko poveča ... itd. Samo vaditi ga je treba, dokler uporabnik ne doseže popolnega nadzora nad quadcopterjem in ga ne obvlada.
Oblikovanje praktičnega quadcopterja
Doslej smo spoznali osnovno konstrukcijo trupa in strojne opreme drona, zdaj pa se naučimo, kako hitro in poceni izdelati kvadrokopter ali dron vezja z zelo običajnimi komponentami. V enem od mojih prejšnjih prispevkov smo se naučili, kako narediti sorazmerno zapleten in zato učinkovit leteči stroj s kvadrokopterjem brez uporabe mikrokrmilnika, za več informacij pa bi si želeli ogledati naslednje prispevke:
Vezje daljinskega upravljalnika brez MCU | Elektronsko vezje
V pričujočem članku poskušamo zgornjo zasnovo poenostaviti tako, da odstranimo brezkrtačne motorje in jo nadomestimo s krtačenimi motorji ter posledično omogočimo, da se znebimo kompleksa Modul vezja gonilnika BLDC .
Ker so podrobnosti mehanske konstrukcije kvadrokopterja že podrobno obravnavane zgoraj, bomo obravnavali le odsek za zasnovo vezja in izvedeli, kako je lahko zgrajen za letenje po predlaganem najpreprostejšem vezju brezpilotnega letala.
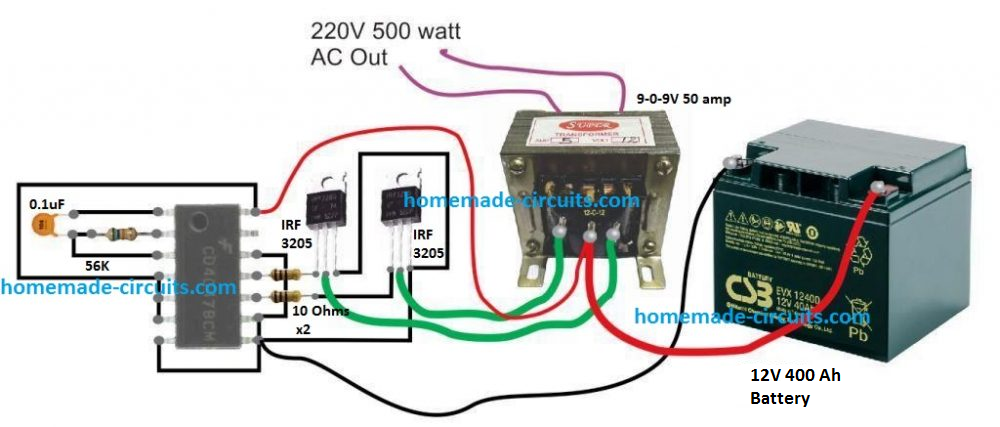
Kot smo že omenili, ta preprosti quadcopter zahteva samo osnovne RF daljinske upravljalne module, kot je prikazano na spodnji sliki:

Boste morali kupite te RF module v kateri koli spletni trgovini ali pri lokalnem prodajalcu rezervnih elektronskih naprav:
Razen zgoraj omenjenega RF daljinski moduli Potrebni bodo tudi štirje motorji s krtačenimi trajnimi magneti, ki dejansko tvorijo srce drona. Lahko je, kot je določeno na naslednji sliki z navedenimi opisi, ali katero koli drugo podobno v skladu z zahtevanimi uporabniškimi specifikacijami:

Električne specifikacije motorja:
- 6V = delovna napetost (vrh 12V)
- 200mA = obratovalni tok
- 10.000 = vrt./min
Seznam delov
- 1K, 10K 1/4 vata = 1 vsak
- Kondenzator 1uF / 25V = 1ne
- Prednastavljeno 10K ali 5K = 1ne
- Rx = žični upor 5 W, vrednost je treba potrditi s poskusi.
- IC 555 = 1 št
- 1N4148 Diode = 2nos
- IRF9540 Mosfet = 1številka
- 6V motor brušen tip = 4nos
- Prilagodljive žice, spajkanje, tok itd.
- PCB za splošno uporabo za sestavljanje zgornjih delov
- 4-kanalni RF daljinski upravljalnik, kot je prikazano na ustreznih slikah.
- Aluminijasti kanali, vijaki, matice, plošče itd., Kot je razloženo v članku.
- Baterija, kot je prikazano spodaj:

Kako konfigurirati sprejemnik daljinskega upravljalnika z motorji
Preden razumemo, kako konfigurirati sprejemnik daljinskega upravljalnika z motorji quadcopter, bi bilo pomembno izvedeti, kako naj bi se hitrosti motorja prilagodile ali poravnale za generiranje zahtevanih gibov levo, desno, naprej in nazaj.
Na dva načina je mogoče omogočiti premikanje kvadrokopterja, in sicer v načinih '+' in 'x'. V svoji zasnovi uporabljamo osnovni način gibanja '+' za naš dron, kot je prikazano na naslednjem diagramu:

Sklicujoč se na zgornji diagram se zavedamo, da moramo za izvajanje želenih smernih manevrov na brezpilotnem letalu preprosto ustrezno povečati hitrost ustreznih motorjev.
To povečanje hitrosti je mogoče uveljaviti s konfiguracijo relejev daljinskega upravljalnika v skladu z naslednjim vezjem. V spodnjem diagramu lahko vidimo IC 555 PWM vezje ožičen s 4 releji modula sprejemnika daljinskega upravljalnika 6 relejev (1 rele je neuporabljen in ga je mogoče enostavno odstraniti, da se poveča prostor in teža).
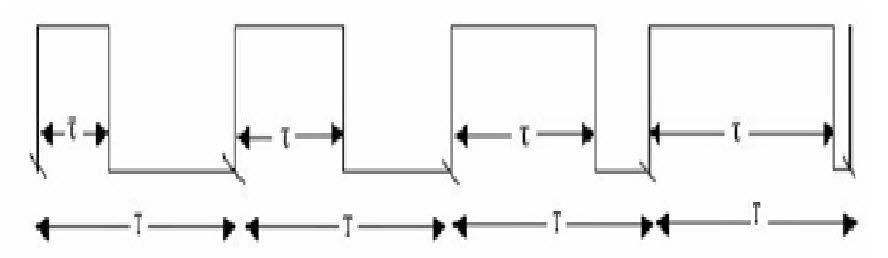
Prilagajanje PWM
Kot je razvidno iz diagrama, je napajanje PWM povezano z vsemi N / C kontakti relejev, kar pomeni, da bi običajno quadcopter lebdel skozi to enakomerno in enako napajanje PWM, katerega obratovalni cikel se lahko sprva prilagodi tako, da quadcopter lahko doseže pravilno določeno količino potiska in nadmorske višine.
To lahko preizkusite z ustreznim prilagajanjem prikazanega PWM lonca.
Kako konfigurirati relejske stike
N / O kontakte relejev je mogoče videti ožičene neposredno s pozitivnim napajanjem, tako da se vsakič, ko se na prenosni prenosni enoti pritisne ustrezen gumb, v sprejemnem modulu aktivira ustrezni rele, ki nato omogoči ustreznemu motorju polno 12V napajanje iz baterije.
Zgornja operacija omogoča aktiviranemu motorju večjo hitrost kot ostali motorji, kar omogoča, da se quadcopter premakne v določeno smer.
Takoj ko se sprosti gumb za daljinsko upravljanje, se brezpilotni avtomat takoj ustavi in še naprej lebdi v stalnem načinu.
Enako je mogoče druge smerne gibe preprosto doseči s pritiskom drugih dodeljenih gumbov na oddaljeni prenosni enoti.
Najvišji rele je namenjen zagotavljanju varnega pristanka stroja, to pa naredimo tako, da zaporedno dodamo trenutno padajoči upor z N / O kontaktom prikazanega releja.
To vrednost upora je treba izračunati z nekaj poskusi, tako da kvadrokopter lebdi okoli nekaj metrov nad tlemi, kadar koli se ta upor preklopi skozi pritrjeni rele.
Shema vezja

Prikazani releji so del sprejemnika RF modula, katerega kontakti na začetku niso povezani (privzeto prazen) in jih je treba ožičiti, kot je prikazano na zgornjem diagramu.
RF daljinski sprejemnik naj bi bil nameščen znotraj kvadrokopterja in njegovi releji povezani z ustreznimi motorji in baterijo, kot je prikazano zgoraj.
Ogledate si lahko nekaj konektorjev (zelene barve), ki lahko po nepotrebnem dodajo težo dronu. Vse lahko odstranite, da zmanjšate težo, in z spajkanjem priključite ustrezne žice neposredno na tiskano vezje.
Kako se premika dron:
Kot je razloženo v zgornji razpravi, s pritiskom določenega gumba na daljavo sproži ustrezen rele modula quadcopter, zaradi česar se ustrezni motor hitreje premika.
Ta postopek pa prisili stroj, da se premika v smeri, nasprotni motorju, ki se preklaplja, da se vrti s hitrejšim vrtljajem.
Tako na primer povečanje hitrosti južnega motorja povzroči, da se stroj premakne proti severu, povečanje severnega motorja pa premakne jug, podobno povečanje hitrosti vzhodnega motorja pa zahodno in obratno.
Zanimivo je, da povečanje motorjev jug / vzhod omogoča quadcopterju premik proti nasprotnemu severu / zahodu, ki je v diagonalnem načinu .... itd.
Prednosti in slabosti zgoraj pojasnjenega enostavnega daljinskega upravljalnika Qaudcopter.
Prednosti
- Poceni in enostaven za izdelavo tudi relativno novega ljubitelja.
- Ne zahteva zapletenih krmilnih palic.
- Lahko ga upravljate z enim 6-kanalnim modulom za daljinsko upravljanje
Slabosti
- Manj učinkovit pri akumulatorju zaradi vpletenosti krtačenih motorjev
- Usmerjena hitrost je konstantna in je z daljinskim upravljalnikom ni mogoče spreminjati
- Manevriranje med preklapljanjem gumbov morda ne bo gladko in nekoliko sunkovito.
Prejšnji: Razložen upor za zaznavanje sile Naprej: Kapacitivni delilnik napetosti