V prispevku je razloženo preprosto linijsko lasersko krmiljeno motorno vezje, ki deluje tako, da se odzove na natančno vodoravno lasersko črto, ki jo ustvari linijska laserska naprava, in samodejno prilagodi poravnavo povezanega orodja ali delovnega dela z izjemno popolnostjo in natančnostjo.
Kaj je Line Laser
Linijska laserska oprema je visoko natančna elektronska zamenjava tesarjev starostnega nivoja.
Linijska laserska naprava je pravzaprav napredna oprema za oddajanje laserja, ki lahko generira 360 ° visoko natančna osvetljena vodoravna laserska črta, ki zagotavlja kalibracijsko referenco za vsa industrijska ali gradbena inženirska dela, tako da je končni rezultat dela popolnoma raven in poravnan brez najmanjših napak.
Vezje je zahteval eden od predanih bralcev tega spletnega dnevnika, gospod Rafal.
Podrobne razprave o delovnem postopku linijskega motorja z laserskim nadzorom lahko dobite iz naslednjih odstavkov:
Cilj oblikovanja
Gospod. Rafal: V tem sem zelo nov. V zadnjih nekaj tednih sem opravil nekaj raziskav in nisem našel točno tistega, kar potrebujem.
Hvaležen bom za kakršno koli pomoč. Prilagam fotografijo svoje ideje. Želim upravljati dva 12 V enosmerna motorja z laserskim nivojem.
Linijski laserski nivo bo signaliziral sprejemnike.

Ta signal bo moral nato nadzorovati smer 12 V enosmernega motorja. Motor vrti navojno palico naprej in nazaj, da prilagodi višino orodja.
Od tistega, kar sem odkril, bi bilo več fotodiod povezanih vzporedno, ena nastavljena za zaznavanje laserja nad ničelno ravnjo in druga pod to ravnjo. Ničelna raven je le nekakšen premor med fotodiodami, da se sistem ne prebudi. Laserski senzor brez zaslona. Dal sem samo slikovno fotografijo.
Potrebujem H mostno vezje, vendar vse, kar sem našel, uporabljam s sistemom Arduino. Če je potrebno, lahko kupim že pripravljen most po razumni ceni do 30 USD
V idealnem primeru bi to delovalo tako z rdečim kot z zelenim laserjem, vendar so valovne dolžine tako različne, da dvomim, da bi to lahko storili in ne bi delovalo v celotnem svetlobnem spektru.
Sprva bi rad določil nivo tega žarka, pritrjenega na motorje, z gumbi gor-dol. Bil bi navdušen, če bi se drugi motor med nastavitvijo nato poravnal z žiroskopom, vendar bi bilo brez Arduina zelo težko.
Menim, da je to, kar poskušam narediti, tako preprosto, da se lahko izognem brez uporabe Arduina. In vztrajam pri analognem, zaradi težkih razmer na gradbišču in zdi se mi, da več kot je elektronike, bolj nezanesljiva je naprava.
Deloval bo samo v zaprtih prostorih, laserska razdalja pa je največ 10 m. Motor, ki sem ga našel na začetku, ima veliko porabo toka 200mA max 2,19 A, hkrati pa tudi velik navor.
Napajanje 18 V DC iz akumulatorja Makita.
Vnaprej hvala za kakršne koli predloge.
Lep pozdrav iz Poljske
Rafal
Stil : Zmeden sem pri delovanju gredi motorja. Vijak z navojem na obeh motorjih bo potisnil orodje, vendar ga ne more potegniti nazaj? Kako se to obnese?
Ali je mogoče isto uporabiti z enim samim motorjem?
Gospod. Rafal: Ravnila za nižje izravnave bi bila morda 70 cm, samo za majhne prostore, npr. stranišče, tako da lahko vstopite skozi vrata.
Stroj brez pogona, ročno vlečen, le izravnalne ravnine. V videoposnetku sta rumena predmeta na jamborjih laserska detektorja, trdno pritrjena na ravnala.
Laser stoji nekje bolj daleč in tvori vodoravno črto.
Motorji bi bili pritrjeni na voziček in navojni vijak za izravnavo ravnil z laserskimi detektorji. Za poravnavo obeh strani morata biti dva motorja, vendar je to zrcalna slika.
Edini skupni del bi bil dvokanalni H most, kot da bi to počel iz že pripravljenega modula in morda žiroskopa, ampak to so sanje :).
Pomembno je, da obstaja gumb za vrtljaje levega in desnega motorja.
Postopek je tak. Laser obesim na primer 2 m nad določeno gladino tal. Odmerjam 2 metra od laserskega žarka do spodnjega roba ravnanja.
Višino uravnavam s pritiskom na stikala desno-levo, tako da je enaka 2 metru do spodnjega roba ravnil. Detektorje sem postavil na jambore tako, da je laserski žarek na ničelni ravni med odseki fotodiode. In ostalo bo storilo samo
V priponki sem dal risbo delovanja detektorja.
Rafal
Oblikovanje vezij

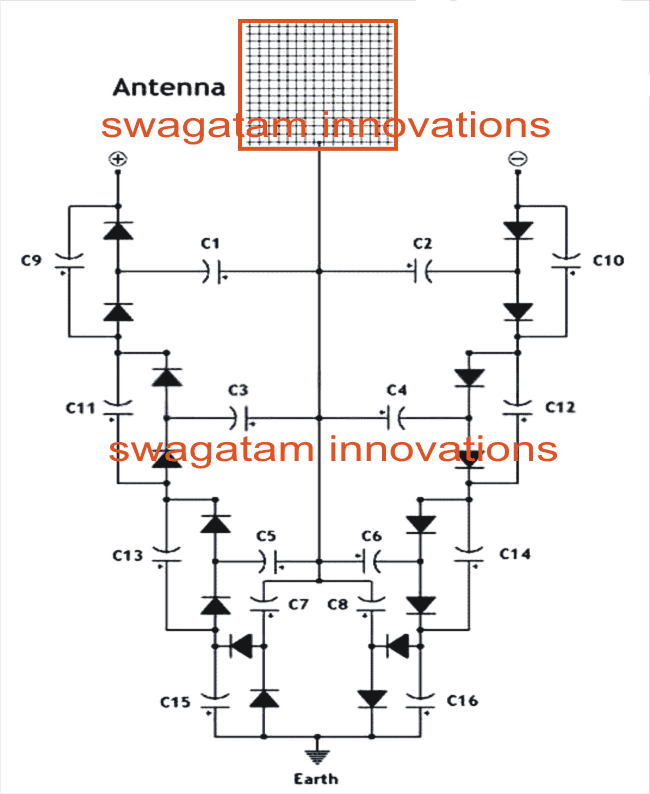
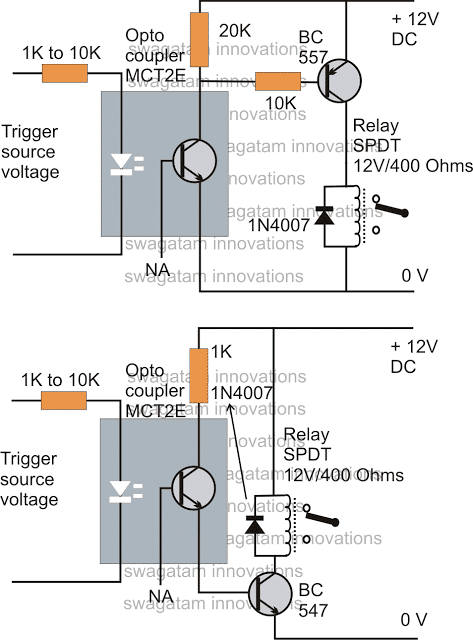
Če pogledamo zgornjo sliko, bosta za odkrivanje in popravljanje pripadajočega motorno krmiljenega orodja glede na natančnost laserske črte potrebni dve taki enaki stopnji vezja.
Dve enaki stopnji sta medsebojni zrcalni sliki, kot je prikazano spodaj:

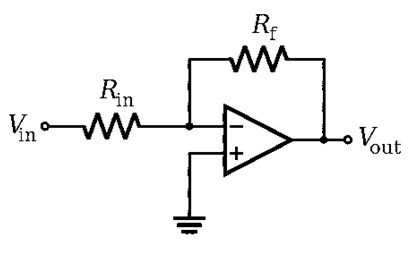
Vezje je dokaj enostavno. Deluje s primerjalnikom oken, ki zagotavlja, da pogonski motorji ne delujejo, če je par LDR-jev izpostavljen z enako svetlostjo laserske črte.
Nato se na neinvertirajočem vhodu A1 in na invertirnem vhodu A2 generira polovica napajalne napetosti.
Takoj, ko se zazna odklon v laserski črti (kar se lahko zgodi, če orodje, ki ga krmili motor, ni poravnano naravnost), se spremeni svetlost, ki vpliva na LDR R1 in R2.
V tem primeru se vhodna napetost primerjalnika oken oddalji od polovice napajalne napetosti. V tem primeru primerjalni izhod ukaže omrežju mostu motorja, da motor premika v smeri urnega kazalca ali v nasprotni smeri urnega kazalca.
Tranzistorji T1. . . T4 so konfigurirani kot mostno omrežje, da omogočajo vklop motorja naprej in nazaj odvisno od osvetlitve LDR ali kota odstopanja laserske črte.
Diode D1. . . D4 so nameščeni tako, da prekličejo najvišje napetosti, ki nastanejo v času, ko motor deluje in deluje. Funkcija prednastavljenih potenciometrov P1 in P2 je namenjena olajšanju nastavitev poravnave.
Ti so natančno nastavljeni, da zagotovijo, da je motor popolnoma izklopljen in neaktiven, če je ustrezen LDR par izpostavljen popolnoma enaki svetlobi laserske svetlobe.
Recimo, na primer, zaradi nepravilne poravnave motorno krmiljenega orodja nagib laserske črte povzroči zmanjšanje svetlobe na LDR R2 kot LDR R1. To bo povzročilo, da se napetost v točki A dvigne nad polovico napajalne napetosti.
V tem primeru izhod opcijskega ojačevalnika A1 postane visok, zaradi česar morajo tranzistorji T1 in T4 delovati. To pa povzroči, da se motor vrti v ustrezno smer. To dejanje samodejno premakne povezano orodje v ravni črti, dokler njegova natančnost vodoravne poravnave ne sovpada z natančnostjo laserske črte.
Nasprotno pa, če predpostavimo, da je orodje nagnjeno z nasprotno usmeritvijo, tako da je osvetlitev LDR nasprotno zgoraj omenjenemu, povzroči, da napetost v točki A pade pod polovico napajalne napetosti. Ta pogoj sproži visoko izhodni ojačevalnik A2, tako da T3 in T2 začneta delovati.
Rezultat tega je, da motor zdaj deluje v nasprotni smeri, da bi popravil poravnavo orodja v ustrezno smer, dokler ne postane popolnoma ravno, kar sovpada z vodoravno natančnostjo laserske črte.
Gumb gor / dol
Gumbe navzgor za začetno prednastavitev višine vodne tehtnice lahko preprosto izvedete tako, da vzporedno z vsakim od LDR-jev ožičite potisna stikala.
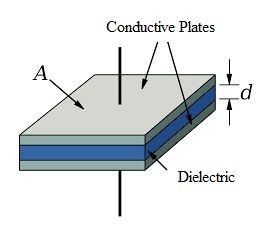
Namestitev LDR
Za pravilen odziv LDR-jev morajo biti levi desni pari nameščeni znotraj ohišja, podobnega cevi, tako da lahko 'vidijo' samo lasersko osvetlitev in ne katero koli drugo svetlobo iz okolice.
Zamisel je lahko priča na naslednji sliki:

Tu lahko vidimo, da so LDR-ji nameščeni zelo blizu drug drugega, kar zagotavlja, da ko je laserska črta v natančnem središču, določen del obeh LDR-parov enakomerno osvetli laserska svetloba.
Sprednja stran ohišja LDR bi lahko bila prekrita z razpršeno lečo, tako da bi lahko lasersko osvetlitev enakomerno razpršila notranjost ustreznih LDR.
Prejšnja: Preprosto protivlomno alarmno vezje za zaščito dragocenih predmetov Naprej: Univerzalno vezje BJT, JFET, MOSFET