V tej dobi industrijska avtomatizacija , roboti se uporabljajo za obdelavo različnih procesov za natančno in boljšo kakovost proizvodnje. Izbira idealnega motorja za popolnega robota je vedno težka naloga pri načrtovanju robota, zlasti za industrijo. Pravilna izbira električni motorji pri industrijskih robotih zahteva več parametrov, da se upoštevajo nadzor roke, položaj, kotni in linearni premiki.

Motorji, ki se uporabljajo v industrijski robotiki
Izbira motorja je najmanj razumljen koncept za ljubitelje robotike, ki zahteva strategijo in resno analizo. Vključuje določanje hitrosti, pospeška, navora glede na težo robota, velikost koles in uporabo, kjer naj bi se uporabljal. Obstaja veliko vrst motorjev so na voljo na današnjem trgu, vendar večinoma Tiny pager motors, servo motorji , linearni motorji, koračni motorji in enosmerni motorji se uporabljajo v industrijskih robotih glede na njihovo področje uporabe.
Nepravilna izbira motorja ima na koncu invalidskega robota, kateri tip motorja je najbolj primeren in primeren za to, da industrijski roboti postanejo resnični, natančni in zadostni, da zadovoljijo vse potrebe industrijskih procesov, pri tem pa upoštevajo vse realne specifikacije?
Tu smo zbrali nekaj vpogledov v ta motor od industrijskih strokovnjakov za izbiro ustreznega motorja za industrijsko uporabo.
Svetujemo vam, da upoštevate mnenja strokovnjakov, katerih cilj je zagotoviti najboljše motorje za industrijsko robotiko z razpoložljivimi enosmernimi, koračnimi, brezkrtačnimi in servo motorji za natančno, stroškovno učinkovito in zanesljivo premikanje robota.
Ch.Sampath Kumar
M.tech v oblikovanju VLSI
Writer tehnične vsebine
 Enosmerni motorji so na voljo v širokem obsegu za neprekinjeno delovanje, vendar zahteva redukcije zobnikov za obleke za ustrezno uporabo. Koračni motor ne zahteva zmanjšanja prestav, saj njegovo stopničasto delovanje zagotavlja nizko hitrost za določene namene. Nazadnje se servo motorji uporabljajo za natančen in natančen nadzor, ki se izvaja v zaprtih zankah. Zahteva pa dodatne povratne informacije in pogonsko vezje, zato je drag kot enosmerni in koračni motor. Tako servo motorji zaradi natančnega gibanja robota naredijo zanesljivejšega.
Enosmerni motorji so na voljo v širokem obsegu za neprekinjeno delovanje, vendar zahteva redukcije zobnikov za obleke za ustrezno uporabo. Koračni motor ne zahteva zmanjšanja prestav, saj njegovo stopničasto delovanje zagotavlja nizko hitrost za določene namene. Nazadnje se servo motorji uporabljajo za natančen in natančen nadzor, ki se izvaja v zaprtih zankah. Zahteva pa dodatne povratne informacije in pogonsko vezje, zato je drag kot enosmerni in koračni motor. Tako servo motorji zaradi natančnega gibanja robota naredijo zanesljivejšega.
Viswanath Prathap
M.Tech iz elektroenergetike
Writer tehnične vsebine

Izberite in postavite Robote običajno najdemo v panogah, da izberejo predmet z enega položaja ali mesta in ga postavijo na drug položaj ali kraj. V ta namen je treba nadzorovati kotne premike spojev robotov, kar lahko dosežemo s pomočjo servo motorjev. Ti servo motorji se krmilijo s pomočjo podatkov PWM, ki jih daje robotski krmilnik za aktiviranje sklepov robotov. Servo motorji lahko ustvarijo dovolj navora za hitro premikanje predmeta iz položaja zaustavitve. Tako se ta uporabljajo kot kolesa v vojaških in industrijskih robotskih vozilih. Koračni motorji se lahko uporabljajo tudi za nadzor položaja, vendar bodo porabili moč tudi v času počitka za samo zaklepanje in držanje ukazanega položaja. Torej, servo motorji se običajno uporabljajo v industrijski robotiki kot visoko zmogljiv nadomestek koračnih motorjev.
S. Naresh Reddy
M.tech v vgrajenem sistemu
Vodnik po projektu
Strukturo mehanskega robota je treba nadzorovati do perfo  rm naloga. Obstajajo tri različne faze za nadzor robota, kot so zaznavanje, obdelava in delovanje. Senzorji robotu posredujejo informacije o položaju njegovih sklepov in njegovega končnega efektorja, nato se te informacije obdelajo v krmilno enoto in izračunajo ustrezen signal motorju, ki se mehansko premika. Velika večina robotov uporablja električne motorje. V prenosnih robotih se uporabljajo večkrat brezkrtačni in brušeni enosmerni motorji, v industrijskih pa roboti. Ti motorji so prednostni v sistemih z lažjimi obremenitvami in kjer je prevladujoča oblika gibanja rotacija.
rm naloga. Obstajajo tri različne faze za nadzor robota, kot so zaznavanje, obdelava in delovanje. Senzorji robotu posredujejo informacije o položaju njegovih sklepov in njegovega končnega efektorja, nato se te informacije obdelajo v krmilno enoto in izračunajo ustrezen signal motorju, ki se mehansko premika. Velika večina robotov uporablja električne motorje. V prenosnih robotih se uporabljajo večkrat brezkrtačni in brušeni enosmerni motorji, v industrijskih pa roboti. Ti motorji so prednostni v sistemih z lažjimi obremenitvami in kjer je prevladujoča oblika gibanja rotacija.
Suresh Megaji
M. Tech v brezžičnih komunikacijskih sistemih
Writer tehnične vsebine

Če se želite ukvarjati z „robotiko“ in njihovo uporabo v „industriji“, morate vedeti za „motorje“, ki se uporabljajo v robotiki, ker je robotika večinoma odvisna od motorjev. V bistvu se „robotski stroji“ uporabljajo za različne aplikacije v proizvodnji. Različni 'motorji', kot so DC, impulzni, koračni, optični pogon, motorji z delnim zavojem in učinkom Hall-a itd., Se uporabljajo z nekaterimi tehnikami, da jih uporabimo v industriji in jih naredimo prijazne, na primer
- DC motorji se uporabljajo za aplikacije, usmerjene na baterije, počasnejše hitrosti in aplikacije za mobilnost.
- Kjerkoli potrebujemo rotacijsko usmerjeno aplikacijo, lahko uporabimo koračne motorje, kot so unipolarni in bipolarni motorji.
- Za premike glave in rok lahko uporabimo motorje z delnim obračanjem.
- Če želimo uporabiti magnetna polja, lahko uporabimo Hall Effect in motorje z optičnimi pogoni itd.
Z uporabo robotike, ki uporablja pametne motorje, lahko prihranimo denar, čas, prostor, nevarna gibanja itd.
Ajay Sahare
Vodja trženja

Industrijski roboti se uporabljajo v industrijskem proizvodnem okolju. To so roke, posebej razvite za uporabo, kot so varjenje, ravnanje z materiali, barvanje in druge.
Vsake mehatronske naprave, ki se uporablja v industrijskem okolju, ni mogoče šteti za robota. Kot je opredelila ISO (Mednarodna organizacija za standardizacijo), se šteje, da je avtomatsko krmiljen, programiran večnamenski manipulator, ki ga je mogoče programirati v treh ali več oseh, industrijski robot.
Motorji, ki se uporabljajo v industrijski robotiki, so
- Motorji z izmeničnim tokom
- Enosmerni (enosmerni) motorji
- Servo motorji
- Koračni motorji.
1. AC motorje lahko nadalje razdelimo na asinhrone in sinhrone tipe. Na primer, indukcijski izmenični motor je asinhrona enota, ki je v bistvu sestavljena iz žično navitega statorja in rotorja. Na žico je priključena moč, izmenični tok, ki teče skozi njo, inducira elektromagnetno (EM) polje v naviti žici z dovolj močnim poljem, ki zagotavlja silo za gibanje rotorja. Sinhroni motorji so motorji s stalno hitrostjo, ki delujejo sinhrono z izmenično frekvenco izmeničnega toka in se pogosto uporabljajo tam, kjer je potrebna natančna stalna hitrost.
2. Številne industrijske aplikacije, vključno z robotiko, pogosto uporabljajo enosmerne motorje zaradi enostavnosti nadzora hitrosti in smeri. Zmorejo neskončno območje hitrosti, od polne hitrosti do nič, s širokim razponom obremenitev.
Ker imajo enosmerni motorji visoko razmerje navora in vztrajnosti, se lahko hitro odzovejo na spremembe v krmilnih signalih. Enosmerni motor je mogoče gladko krmiliti do ničelnega gibanja in ga takoj pospešiti v nasprotno smer, ne da bi bilo treba zapletati vezje za preklop moči. Brezkrtačni enosmerni motorji s trajnimi magneti so običajno dražji od tipov ščetk, čeprav lahko nudijo prednosti pri porabi energije in zanesljivosti.
Brez komutatorja lahko brezkrtačni motorji delujejo učinkoviteje in pri višjih hitrostih kot običajni enosmerni motorji. Večina brezkrtačnih enosmernih motorjev deluje na trapezni izmenični valovni obliki, nekateri pa delujejo s sinusnimi valovi. Brezkrtačni motorji s sinusnim valom lahko z valovanjem z nizkim navorom dosežejo nemoteno delovanje pri nižjih hitrostih, zaradi česar so idealni za brušenje, premazovanje in druge namene, kot je površinska obdelava.
Če želite enosmerne motorje z brušenim sistemom, če želite, da se motor počasneje vrti brez izgube moči, lahko uporabite impulzno širinsko modulacijo (PWM). To v bistvu pomeni vklop in izklop motorja zelo hitro. Na ta način se motor vrti z nižjo hitrostjo, kot da bi bila uporabljena nižja napetost, ne da bi skrbeli za moč.
V bistvu je navor, ki ga ustvari brušeni enosmerni motor, premajhen, hitrost pa prevelika, da bi bila koristna. Torej se redukcije prestav običajno uporabljajo za zmanjšanje hitrosti in povečanje navora.
3. Servo motorji se uporabljajo v zaprtih sistemih z digitalnim krmilnikom. Krmilnik pošlje ukaze za hitrost pogonskemu ojačevalniku, ki nato napaja servo motor. Nekatera povratna naprava, kot sta razdeljevalec ali dajalnik, zagotavlja informacije o položaju in hitrosti servo motorja. Razreševalec ali dajalnik sta lahko integrirana z motorjem ali nameščena na daljavo. Zaradi sistema z zaprto zanko lahko servo motor deluje s posebnim profilom gibanja, ki je programiran v krmilniku.
4. Koračni motorji lahko delujejo s povratno informacijo ali brez nje, pri čemer se vrtenje motorja razbije na majhne kotne stopnice. Nadzirajo ga impulzni ukazni signali in se lahko natančno ustavi na ukazani točki, ne da bi morali uporabljati sklope zavor ali sklopke. Ko se napajanje odstrani, koračni motor s trajnim magnetom običajno ostane v zadnjem položaju. Več koračnih motorjev lahko sinhroniziramo tako, da jih poganjamo iz skupnega vira.
Dev desai
Vodja trženja 
Če se želite vključiti v robotiko, se boste morali seznaniti s številnimi razpoložljivimi vrstami motorjev. Vsa gibanja robotike so tako ali drugače motorizirana, zato je pomembno vedeti, kakšna je vaša možnost.
Enosmerni motorji
Smer gibanja enosmernega motorja poleg delovanja na baterijo določa tudi polarnost vhodne moči. To je nujno potrebno za robotske funkcije. Na srečo je ta vrsta motorja različnih velikosti, zahtev glede napetosti in je na voljo povsod.
Različni tipi motorjev so navedeni spodaj
- Osnovni motor za mobilnost
- Visoko hitrostni hobi motor
- Jermenski pogonski motor
- Avtomobil z režo
- Impulz operiran
- Roko prilagojen motor
- Bipolarni steper s kazalcem
Bio Motor
Bio-kovina je neverjetna snov, ki obstaja že nekaj let in ima številne aplikacije na področju robotike. Na sliki lahko vidimo, da se bo kos bio-kovinske žice skrčil za pet odstotkov dolžine, ko bo čeznjo prišlo le nekaj voltov. Po letih preizkušanja se je bio-žica izkazala za močno, zanesljivo in postaja vse bolj uporabna, ko se pojavljajo novi izdelki. Zaradi nekoliko počasnejšega odzivnega časa je idealen za robotske aplikacije rok in rok, kjer bi bila sunkovitost problematična. Dolg kos žice lahko povzroči znaten premik, če je robotska roka raztegnjena po celotni dolžini. Trenutno so na komercialnem trgu robotski kompleti za roke, ki uporabljajo bio kovine.
Releji
Rele se v robotiki skoraj vedno uporablja za ločevanje moči, namenjene motorjem, od napajanja za računalniške funkcije. Motorji zaradi svoje nizke impedance postavljajo velike trenutne zahteve na napajalnike in ustvarjajo več napak, ki jih računalniki ne morejo prenašati. Zato je dobro uporabiti ločen visokotokovni vir samo za motorje.
Solenoidi
Solenoide je najbolje uporabiti kot nadzorne naprave manipulatorja ali upravljalnike stikal. Njihovo gibanje je hitro in močno, zato se v prijemalih skoraj vedno uporabi vzmet, ki omili delovanje. Kot lahko vidite na sliki, se krmilne žice uporabljajo za zapiranje prijemala. Te krmilne žice lahko delujejo tudi kot povratne vzmeti. Takšne grabežnike najdemo bolj v delu proizvodne linije, kjer je naloga zelo izmerjena in pokriva ozke parametre.
Sekundarne funkcije
Večina gibalnih funkcij vključuje gibljivost, roko, glavo ali kakšno drugo vidno zunanje gibanje, vendar nekateri gibalni gibi niso tako vidni. Veliki industrijski roboti uporabljajo hidravlične sisteme, ki z motorji črpalk ustvarjajo delovni tlak hidravlične tekočine. Druga pomembna sekundarna funkcija motorjev je nadzorovana nastavitev. Za izboljšanje natančnosti so potenciometri, ki so povezani z motorji, običajno večkratne naprave.
Zaključek
Roboti so lahko zelo zapletene naprave, ki zahtevajo najrazličnejše gibe na motorni pogon. Ta članek je namenjen pregledu nabora naprav, s katerimi imate opravka kot graditelj robotov. Dobro bi bilo začeti z raziskavami dobaviteljev robotske opreme in razpoložljivih zalog. Zdaj je na voljo ogromno izdelkov, internet pa olajša iskanje, učenje in uporabo. Ne glede na vaše potrebe, vam mora biti malo iznajdljivosti in odločnosti, ki jo imajo vsi proizvajalci robotov, v dobro.
Samadan Wandre
Vodja trženja
'Motorji, ki se uporabljajo v robotiki'
- Osnovni motor za mobilnost

- Visoko hitrostni hobi motor
- Jermenski pogonski motor
- Avtomobil z režo
- Impulz operiran
- Roko prilagojen motor
- Bipolarni steper s kazalcem

Večji motorji so najbolj primerni za baze mobilnosti, ki robotom omogočajo manevriranje po terenu. Nekateri od teh motorjev imajo menjalnike, ki ustvarjajo počasnejšo hitrost in navor, ki sta potrebna za mobilnost. Znižanje napetosti na motorju ga lahko tudi upočasni na bolj zaželeno hitrost. Samo poskusi lahko določijo, ali bo vaš motor deloval z nižjo napetostjo. Če se to zgodi, ste si prihranili veliko težav, če ne, obstajajo tudi drugi načini za upočasnitev motorjev. Nekatere hitre motorje je mogoče uporabiti, če se uporabljajo polžni ali vijačni zobniki.
Primer vijačnega orodja je razviden iz ilustracije robotske roke. Ko se motor obrne v smeri urinega kazalca, se sklop vijakov potegne na motor in roka se stisne in ko se obrne v nasprotni smeri urnega kazalca, se roka iztegne. Čeprav se gred motorja hitro obrača, je delovanje roke zaradi zmanjšanja vijaka precej počasnejše. Na tej naslednji sliki motornega kroga vidimo enosmerni motor, ki ga krmili močnostni tranzistor. Relejsko stikalo (Double Pole Double Throw) določa smer. Tranzistor Q1 bi moral biti močni tranzistor, ki bi prevzel veliko obremenitev motorja.
Impulzni motorji
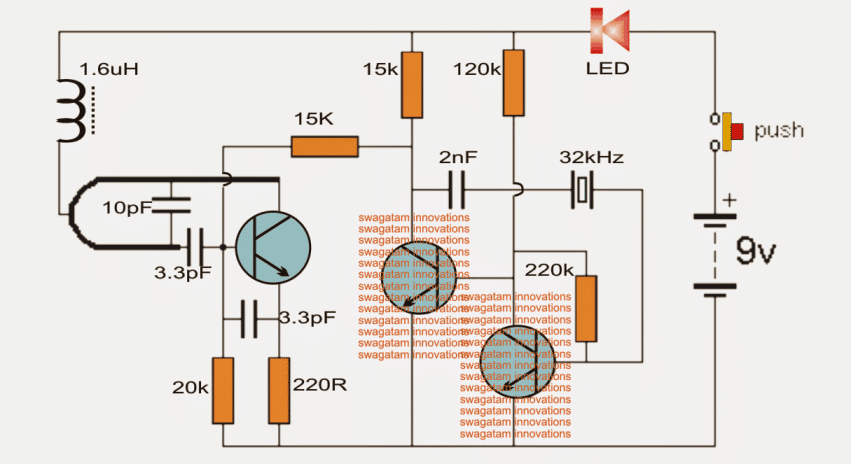
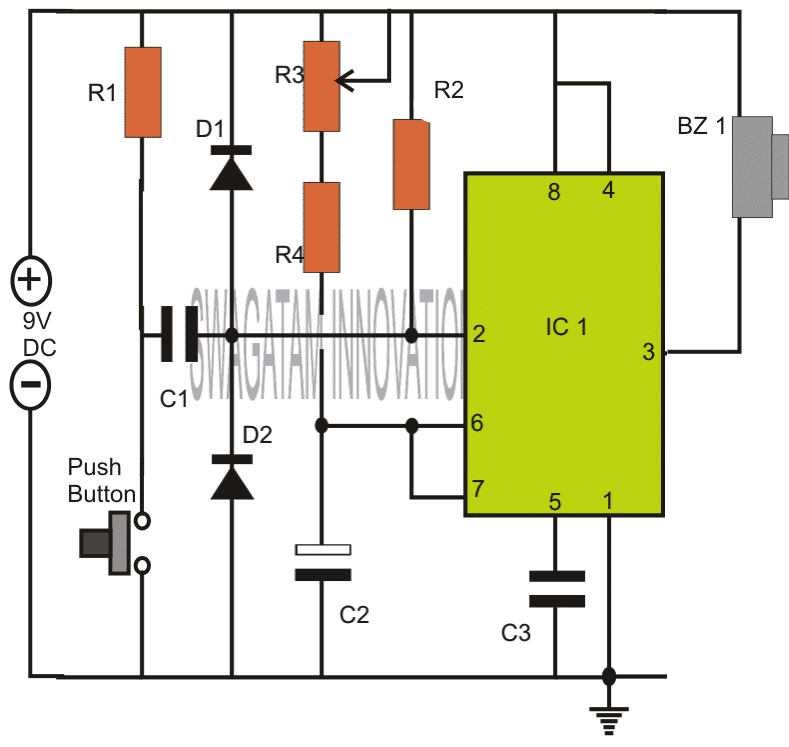
Nekateri motorji dosežejo zmanjšanje hitrosti z delovanjem iz impulznega enosmernega signala. Ta signal je običajno približno sto Hz. Hitrost motorja lahko spremenite s spreminjanjem širine impulza in ne s spreminjanjem frekvence impulza. Takšne motorje najdemo v trgovinah s presežki elektronike in jih zlahka prepoznamo po impulznem generatorju, ki je nanj povezan. Kateri koli enosmerni motor lahko poganja impulzni vir, priložena pa je tudi shema takega vezja.
Kot lahko vidite, je bil za pogonski oscilator izbran 555 časovnik, ki proizvaja frekvenco približno 100 Hz. Upor R1 in kondenzator C stabilizirata in izolirata impulzni generator od konic, ki jih proizvaja motor. Ker ta naprava lahko črpa iz napajalnika od 6 do 12 voltov, boste morda želeli spremeniti vrednost kondenzatorja C4 in C6 za boljše rezultate, odvisno od napetosti, ki jo uporabljate. Impulzni izhod se vzame iz tretjega nožice IC1 in se napaja na dva nožice IC2, prav tako 555 časovnika.
Drugi časovnik spreminja širino impulza s prilagoditvijo napetosti, ki se napaja na kondenzator C6 prek potenciometra R5 in upora R6. Trajanje impulza je tisto, kar določa hitrost motorja, širino impulza pa je mogoče prilagoditi od 10% do 100%.
Tranzistor Q1 sprejema modul modulirane širine impulza skozi upor R7. Ker je Q1 nizkonapetostna naprava, signal prenaša na Q2, močnostni tranzistor, ki lahko obvlada trenutne potrebe motorja. Ti tranzistorji niso kritični in skoraj vse vrste močnostnih tranzistorjev bodo delovale. Rele bo določil smer vožnje motorja.
Koračni motorji
Najbolj kompleksen od vseh motorjev je koračni motor. Tako kot ime izhaja, se motor obrača v stopinjah in deluje na impulz. Natančna stopnja obrata na korak se lahko razlikuje od proizvajalca do modela, vendar je 20 stopinj priljubljeno in ustvari 18 korakov za en popoln obrat. Obstajata dve osnovni vrsti koračnih motorjev, bipolarni in unipolarni. Kot lahko vidite v shemi koračnega motorja, je bipolar preprosto motor z dvema tuljavama.
Enopolni tip sta dve tuljavi s sredinskimi pipami. Če prezrete sredinske pipe, lahko unipolarni motor deluje kot bipolarni tip. Dve tuljavi v koračnem motorju se izmenično napajata stopničastih impulzov po polarnosti od tuljave do tuljave. Zemljevid tega postopka je v delovnem diagramu za grafično predstavitev gibalnega delovanja. Za razliko od običajnih enosmernih motorjev se navor s hitrostjo zmanjšuje. Za napredovanje koračnega motorja je potrebna tudi posebna vrsta pogonske enote, ki mora biti priložena motorju. Priporočljivo je, da gradite krmilno enoto, razen če je motor opremljen z dobrimi tehničnimi podatki, ki vsebujejo priporočila za sestavne dele in popolno shemo.
Motor bo morda potreboval odbojnike, da ga bo izoliral od pogonskega sistema, ali pa bo potreboval ločeno napajanje. Ne glede na potrebe se lahko med motorji precej razlikujejo. Trgovine s hobi izdelki so najbolj zanesljivi dobavitelji koračnih motorjev, in čeprav jih imajo občasno elektronske trgovine, morda ne vključujejo potrebnih specifikacijskih informacij
Motorji z delnim zavojem
Nekatere robotske funkcije zahtevajo le delni obrat, na primer premike glave ali roke. Te najlažje dosežemo s pozicijskimi zapori in drsnimi zobniki. Slika mehanskih podrobnosti tega tipa motorja je navedena zgoraj. Mikro stikala lahko uporabite kot senzorje za zaustavitev za izklop napajanja in ponastavitev smeri naslednjega dejanja.
Spodnje kolo je povezano z motorjem, medtem ko je zgornje kolo od spodnjega kolesa ločeno s krožnim kosom klobučevine. Ko se spodnje kolo zavrti, se zgornje kolo vrti z njim, dokler zaporni zatič ne pride v stik z mikro stikalom. Nekateri modeli ne predvidevajo zaustavitve motorja, zato bodo preprosti vijaki z distančniki delovali kot zaustavitve motorja.
Bio-Motor
Bio-kovina je neverjetna snov, ki obstaja že nekaj let in ima številne aplikacije na področju robotike. Na sliki lahko vidimo, da se bo kos bio-kovinske žice skrčil za pet odstotkov dolžine, ko bo čeznjo prišlo le nekaj voltov. Po letih preizkušanja se je bio-žica izkazala za močno, zanesljivo in postaja vse bolj uporabna, ko se pojavljajo novi izdelki. Zaradi nekoliko počasnejšega odzivnega časa je idealen za robotske aplikacije rok in rok, kjer bi bila sunkovitost problematična. Dolg kos žice lahko povzroči znaten premik, če je robotska roka raztegnjena po celotni dolžini. Trenutno so na komercialnem trgu robotski kompleti za roke, ki uporabljajo bio kovine.
Bhaskar Singh
Vodja trženja
 Industrijski roboti so naprave, ki v določeni meri podvajajo človekovo gibanje, hkrati pa zmanjšujejo nevarnosti in zagotavljajo več moči, natančnosti in kontinuitete. Potrebujejo širok spekter gibov, ki jih poganja motor, odvisno od njihovih načinov delovanja, upravljanja, uporabljenih orodij in dela, ki ga je treba opraviti. Industrijski robotski motor bi moral biti sposoben opravljati širok spekter nalog kot običajni motorji, da bi se lahko specializiral za določeno nalogo.
Industrijski roboti so naprave, ki v določeni meri podvajajo človekovo gibanje, hkrati pa zmanjšujejo nevarnosti in zagotavljajo več moči, natančnosti in kontinuitete. Potrebujejo širok spekter gibov, ki jih poganja motor, odvisno od njihovih načinov delovanja, upravljanja, uporabljenih orodij in dela, ki ga je treba opraviti. Industrijski robotski motor bi moral biti sposoben opravljati širok spekter nalog kot običajni motorji, da bi se lahko specializiral za določeno nalogo.
Električni motorji se najpogosteje uporabljajo v industrijski robotiki zaradi zelo učinkovitega pridobivanja električne energije in sorazmerno enostavnega oblikovanja, zaradi česar so bolj priljubljeni v smislu stroškovne učinkovitosti v vseh pogledih - namestitve, vzdrževanja in servisiranja.
Glede na potrebno delo se različni motorji uporabljajo za različne namene. Na primer enosmerni motorji se uporabljajo za premikanje v smeri urnega kazalca in v nasprotni smeri urnega kazalca, primeri so pri žerjavi in dvigalih, impulzni motorji se uporabljajo za zagotavljanje pulznih gibanj z uporabo enosmerne impulzne širine, motorji z delnim obračanjem se uporabljajo za premikanje glave in roke in najbolj zapleteni - koračni motorji se uporabljajo za zagotavljanje stopničastih obratov v korakih.
Poleg tega se za različne namene uporabljajo motorji z različnimi nazivi in velikostmi. Obstaja več vrst motorjev, ki imajo različne namene na različnih mestih, odvisno od dela in zasnove robota.
Mohan Krišna. L
Vodja prodaje in podpore
Roboti se uporabljajo za delo, ki bi ga lahko opravljali ljudje, in obstaja veliko razlogov, zakaj so roboti boljši od ljudi. 
Obstajata dve glavni vrsti robota: -
Mobilni robot: To gibanje po nogah ali gosenicah.
Stacionarni robot: To ima fiksno bazo.
Stacionarne robote je običajno mogoče uporabiti za pobiranje predmetov ali opravljanje kakšnega drugega dela, ki vključuje doseganje predmeta.
Robotska roka ima tri osnovne dele: -
- Rameni sklep
- Zapestni sklep
- Fiksna osnova
Potrebuješ robota za
- Sposobnost hitrega in nevarnega okolja.
- Sposobnost ponavljanja nalog znova in znova.
- Sposobnost natančnega dela.
- Sposobnost opravljanja različnih nalog.
- Učinkovitost.
Motor je naprava, ki električno energijo pretvori v mehansko, tj. Elektromehansko napravo. Obstajata dve vrsti motorjev, kot sta AC motor in DC motor
Motor, ki se uporablja v industrijski robotiki, je servo motor. Servo motor je preprost električni motor, krmiljen s pomočjo servo mehanizma. Če krmiljeni motor deluje z izmeničnim tokom, se imenuje AC servo motor, sicer DC servo motor. Večina servo motorjev se lahko vrti približno 90 do 180 stopinj. Tudi nekateri se vrtijo skozi polnih 360 stopinj ali več. Nekatere aplikacije servo motorja v robotiki so
- Aplikacija servo motorja v robotski tehnologiji, to je preprost robot za izbiro in postavitev, ki se uporablja za izbiro predmeta iz enega položaja in postavitev predmeta v drug položaj.
- Servo motor v transportnih trakovih se uporablja
- v industrijskih proizvodnih in montažnih enotah za prenos predmeta iz ene zbirne postaje v drugo. Na primer: - postopek polnjenja steklenic.
- Servo motor v robotskem vozilu tukaj Servo motor, ki se uporablja v kolesih. Ker se uporablja servo motor z neprekinjenim vrtenjem.
Dinesh.P
Vodja trženja
 Predstavili bi robote, da bi zmanjšali človeška prizadevanja in pomagali ljudem ustvariti srečo za prihodnji razvoj. Izraz roboti pomeni stroj, ki posnema različne človeške lastnosti. Robotika vključuje znanje strojništva, elektronike, elektrotehnike in računalništva. Motorji, ki se uporabljajo v robotih, so enosmerni motorji, koračni in servo motorji
Predstavili bi robote, da bi zmanjšali človeška prizadevanja in pomagali ljudem ustvariti srečo za prihodnji razvoj. Izraz roboti pomeni stroj, ki posnema različne človeške lastnosti. Robotika vključuje znanje strojništva, elektronike, elektrotehnike in računalništva. Motorji, ki se uporabljajo v robotih, so enosmerni motorji, koračni in servo motorji
Kje,
- Enosmerni motorji se uporabljajo za neprekinjeno vrtenje
- Koračni motorji se uporabljajo za vrtenje pri nekaj stopinjah
- Servo motorji se uporabljajo za pozicioniranje, lahko se uporabljajo v avtomobilih in letalih
Ganesh .J
Vodja trženja 
Roboti se uporabljajo za delo, ki bi ga lahko opravljali ljudje, hkrati pa zmanjšujejo človeški napor in čas ter izboljšujejo kakovost.
- Motorji z izmeničnim tokom
- Enosmerni (enosmerni) motorji
- Servo motorji
- Koračni motorji.