V tem prispevku se naučimo krmiljenja vzvratnega časovnika za upravljanje mehanizma motorja inkubatorja s prednostnim nizom gibov. Idejo je zahteval gospod Anwar
Tehnične specifikacije
Prihajam iz Indonezije ..... Potrebujem sheme za inkubatorski časovnik z motorjem z visokim navorom (okno z električnim tokom v avtomobilu). Poskušam doseči, da enosmerni motor deluje v dve smeri, dokler ne doseže končnega položaja, nato pa ustavim in preklopim polariteto, da bo ob ponovni uporabi moči deloval v drugo smer. Nato naredite isto na drugem koncu.
1. časovnik vklopi napajanje za 1 min. (Od 7.00 do 7.00)
2. motor teče v eno smer, dokler ne doseže zaustavitvenega položaja, recimo 30sec.
3. napajanje motorja se izklopi, ko doseže položaj zaustavitve in zakasni za 1 min. časovnik za izklop / izklop glavnega napajanja. tudi obrne polarnost, tako da.
4. naslednjič, ko se vklopi glavni časovnik (10: 00-10: 01), dozira isto stvar v obratni smeri in neprekinjeno ponavlja
5. 12 VDC motor vzvratno (samo dva kabla od motorja + in -)
6. Potreben LED indikator za motor vrtljajev / vrt
Ali mi lahko pomagate, gospod?
Vnaprej se vam zahvaljujem za pomoč.
To je pomemben domači projekt, ki mora biti 100% zanesljiv.
Dizajn

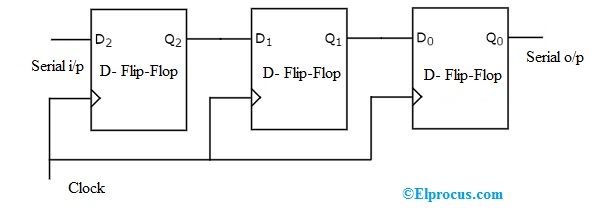
Na zgornji sliki si lahko predstavljamo zasnovo za izvedbo predlaganega povratnega gibanja motorja inkubatorja naprej po vnaprej določenem časovnem intervalu.
V trenutku, ko je vklopljeno napajanje, imamo naslednji scenarij:
Lahko se domneva, da je magnetno stikalo za „nastavljeno“ v izključenem stanju ali pritisnjeno, medtem ko je motor ali načrtovani mehanizem inkubatorja v začetnem položaju nič.
Upoštevajte, da bi bilo treba stikala za nastavitev / ponastavitev izvajati z magnetnimi trstičnimi stikali.
Ko je napajanje vklopljeno, se IC 4060 ponastavi prek C2, tako da začne postopek štetja od nič, pin3 pa postane ničelna logika.
Ta začetna ničelna logika se prek C3 dovede do osnove T1, ki takoj privede do aktiviranja T3 in pripadajočega releja. R7 v postopku zagotavlja, da se T1 / T3 zaskoči v tem načinu.
Rele DPDT na tej točki deluje na svojih N / O kontaktih, ki sprožijo motor in mehanizem, za predpostavljeno gibanje naprej.
Takoj, ko se motor začne premikati, se sprosti gumb za nastavitev, tako da T4 in zgornji SPDT dobita priložnost za aktiviranje, pri čemer rele SPDT doseže preklop položaja N / O, ki N / C kontakte DPDT v stanju pripravljenosti upodablja zaloga ..
Motor in / ali mehanizem se premika, dokler ne doseže položaja 'reset', zaradi česar se T2 aktivira in prekine zapah T1 / T4.
Ko je T4 izklopljen, rele DPDT spremeni svoj položaj iz N / O v N / C in zagotavlja nasprotno (vzvratno) gibanje motornega mehanizma.
Mehanizem motorja inkubatorja zdaj obrne svojo smer in sproži vzvratno gibanje, dokler ne doseže 'nastavljene točke', ki hitro izklopi osnovni pogon T4, SPDT izklopi moč rezanja DPDT in celoten mehanizem ustavi .
Medtem IC 4060 nadaljuje s štetjem, dokler po prehodu skozi visoko logiko na svojem pin3 (s praznjenjem C3) še ni ustvaril nič logike.
Cikel se ponovno zažene in ponovi postopek, kot je opisano zgoraj.
Prejšnji: Utripanje LED z Arduino - popolna vadnica Naprej: Raziskali visokonapetostni industrijski odvodnik prenapetosti