Ko zaslišimo besedo operacijski sistem, najprej pomislimo na operacijski sistem, ki se uporablja v prenosnikih in računalnikih. Na splošno uporabljamo različne vrste operacijskih sistemov, kot so Windows XP, Linux, Ubuntu, Windows 7,8.8.1 in 10. V pametnih telefonih so operacijski sistemi kot KitKat, Jellybean, marshmallow in Nougat. V digitalni elektronski napravi obstaja nekakšen operacijski sistem, ki ga je razvil program mikrokrmilnika . Obstajajo različne vrste operacijskih sistemov razviti za mikrokrmilnik, toda tukaj smo razpravljali o operacijskem sistemu v realnem času.
Kaj je operacijski sistem v realnem času?
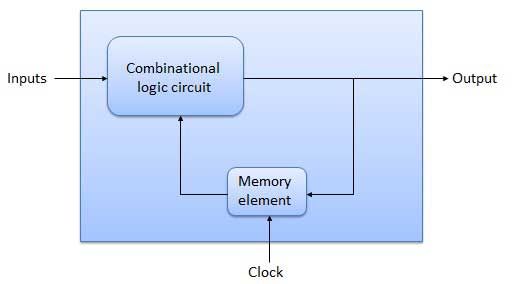
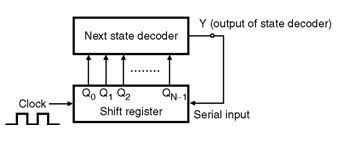
RTOS je operacijski sistem, možgani sprotnega sistema in njegov odziv na vhode takoj. V RTOS-u bo naloga končana do določenega časa in njeni odzivi na predvidljiv način na nepredvidljive dogodke. Struktura sistema RTOS je prikazana spodaj.

Struktura RTOS
Vrste RTOS
Sledijo tri različne vrste RTOS
- Mehki sprotni operacijski sistem
- Trdi operacijski sistem v realnem času
- Trden operacijski sistem v realnem času

Vrste RTOS
Mehki operacijski sistem v realnem času
Mehki operacijski sistem v realnem času ima določene roke, ki jih lahko zamudijo in bodo ukrepali v trenutku t = 0 +. Mehki operacijski sistem v realnem času je vrsta operacijskega sistema in ne vsebuje omejenih ekstremnih pravil. Kritični čas tega operacijskega sistema je do neke mere zakasnjen. Primeri tega operacijskega sistema so digitalni fotoaparat, mobilni telefoni in spletni podatki itd.

Mehki operacijski sistem v realnem času
Trdi operacijski sistem v realnem času
To je tudi vrsta OS in se napoveduje v roku. Predvideni roki bodo reagirali v času t = 0. Nekateri primeri tega operacijskega sistema so nadzor zračnih blazin v avtomobilih, protiblokirna zavora in nadzor motorja itd.
Trden operacijski sistem v realnem času
V podjetju v realnem času ima operacijski sistem določene časovne omejitve, niso strogi in lahko povzročijo neželene učinke. Primeri tega operacijskega sistema so vizualni pregled industrijske avtomatizacije.
Delo z operacijskim sistemom v realnem času
Obstajajo različne vrste osnovnih funkcij sistema RTOS
- Načrtovalnik na podlagi prioritet
- Rutinska prekinitev sistemske ure
- Deterministično vedenje
- Sinhronizacija in sporočanje
- Storitev RTOS
Prednostni načrtovalec
V načrtovalniku, ki temelji na prioritetah, je večina RTOS med 32 in 256 možnimi prednostnimi nalogami za posamezne naloge ali procese. Ta razporejevalnik bo postopek zagnal z najvišjo prioriteto. Če se naloga izvaja na CPU, se zažene naslednja naloga z najvišjo prioriteto in nadaljuje procese.
V sistemu bo proces z najvišjo prioriteto imel CPU
- Teče zapreti
- Če prvotno nalogo prevzame nova, je pripravljen postopek z visoko prioriteto.
Obstajajo tri stanja nalog ali procesov, ki so kot pripravljena za zagon, drugo pa je blokirano, opis vsakega stanja pa je podan spodaj.
Pripravljen na tek
Pripravljen naj bi bil takrat, ko ima proces na voljo vse vire, vendar ne bi smel biti v stanju, ki bi se izvajal. Nato se pokliče kot pripravljen za zagon.
Tek
Če se naloga izvaja, naj bi bila v stanju, ki se izvaja.
Blokirano
Če v tem stanju nima dovolj sredstev za zagon, se pošlje v blokirano stanje.
Za razporejanje naloge so spremenjene tri tehnike, sledijo pa tudi njihovi opisi.
Načrtovanje sodelovanja
Pri tej vrsti razporejanja se bo naloga izvajala, dokler se izvajanje ne zaključi
Razpored okroglega robina
V tem razporedu je vsakemu procesu dodeljena določena časovna reža in postopek mora dokončati izvedbo, sicer pa naloga izgubi pretok in generiranje podatkov.
Prednostno razporejanje
Prednostno razporejanje vključuje prednostno časovno odvisno dodelitev časa. Običajno se uporablja 256 prednostnih stopenj in vsaka naloga ima edinstveno prednostno raven. Nekateri sistemi podpirajo bolj prednostno raven, več nalog pa ima nekaj prednostnih nalog.
Redna prekinitev sistemske ure
Za izvajanje časovno občutljive operacije bo RTOS ponudil nekakšne sistemske ure. Če je sistemska ura 1ms, morate nalogo opraviti v 50ms. Običajno obstaja API, ki vam sledi, da rečete »čez 50 ms me zbudi«. Zato bi bila naloga v spalnem položaju, dokler se RTOS ne prebudi. Imamo dve obvestili, da prebujeni ne bo zagotovil zagona točno takrat, je odvisno od prioritete in če trenutno deluje višja prioriteta, bi to zamujalo.
Deterministično vedenje
RTOS se močno premakne, da zaščiti, da ne glede na to, ali ste izvedli 100 ali 10 nalog, ne spreminja razdalje med preklopom konteksta in določa naslednjo nalogo z najvišjo prioriteto. V glavnem območju je determinističen RTOS obdelava prekinitev, ko jim signalna linija prekine, RTOS takoj ukrepa v skladu s pravilno rutinsko prekinitveno rutino in prekinitev se obravnava brez odlašanja.
Hrupiti moramo, da bodo razvijalci projekta napisali ISR-je, specifične za strojno opremo. Pred tem RTOS daje ISR-je za serijska vrata, sistemske ure in morda mrežno strojno opremo, če pa je kaj specializiranega, na primer signali srčnega spodbujevalnika, aktuatorji itd., Niso del RTOS-a.
To je vse o bruto posplošitvah in v RTOS je zelo raznolika izvedba. Nekateri RTOS delujejo drugače in zgornji opis je primeren za velik del obstoječih RTOS.
Sinhronizacija in sporočanje
Sinhronizacija in sporočanje omogočata komunikacijo med nalogami enega sistema in sistemom za pošiljanje sporočil, ki sledijo. Za sinhronizacijo notranjih dejavnosti se uporablja zastavica dogodka in za pošiljanje besedilnih sporočil, ki jih lahko uporabimo v nabiralniku, kanalih in čakalnih vrstah. V skupnih podatkovnih območjih se uporabljajo semaforji.
- Semaforji
- Dogodkovne zastavice
- Nabiralniki
- Cevi
- Čakalne vrste sporočil
Storitev RTOS
Najpomembnejši del operacijskega sistema je jedro. Za spremljanje strojne opreme je treba razbremeniti naloge in odgovornosti jedra upravlja in razporeja vire. Če naloga ne more vsakič pritegniti pozornosti CPE, potem jedro ponuja še nekatere druge storitve. V nadaljevanju so
- Časovne storitve
- Storitve obdelave prekinitev
- Storitve upravljanja naprav
- Storitve upravljanja pomnilnika
- Vhodno-izhodne storitve
Prednosti RTOS
- Ko so vsi viri in naprave neaktivni, RTOS zagotavlja največjo porabo sistema in večjo zmogljivost.
- Ko se opravilo izvaja, napake ni mogoče dobiti, ker RTOS ne vsebuje napak.
- Dodelitev pomnilnika je najboljša vrsta za upravljanje v tej vrsti sistema.
- V tej vrsti sistema je čas prestavljanja zelo manjši.
- Zaradi majhnosti programa se RTOS uporablja v vgrajeni sistem kot so prevoz in drugi.
V tem članku smo razpravljali o tem, kako bo deloval operacijski sistem v realnem času. Upam, da ste z branjem tega dobili nekaj osnovnih informacij. Če imate kakršna koli vprašanja glede tega članka oz za izvajanje električnih projektov , vas prosimo, da komentirate v spodnjem oddelku. Tu je vprašanje za vas, kakšne so funkcije sistema RTOS?