Električni stroj, ki pretvarja električno energijo v mehansko energijo imenujemo elektromotor. Prvi in najpomembnejši električni motor je preprosta elektrostatična naprava, ki jo je v 1740-ih ustvaril škotski menih Andrew Gordon. Toda leta 1821 je Michael Faraday demonstriral pretvorbo električne energije v mehansko.
Elektromotorji so v prvi vrsti razvrščeni v dve kategoriji: AC motorji in Enosmerni motorji . Spet je vsaka kategorija razdeljena na več vrst. Veliko obremenitev, kot so mešalnik, brusilnik, ventilatorji itd., Najpogosteje uporabljeni gospodinjski aparati, v katerih najdemo različne tipe motorjev in jih je mogoče upravljati z različnimi hitrostmi z možnostjo nadzora hitrosti motorjev. V tem članku bomo razpravljali o enem glavnih tipov enosmernih motorjev, in sicer Koračni motor in njegovo upravljanje z uporabo mikrokrmilnika.
Koračni motor
Sinhroni in brezkrtačni enosmerni motor ki pretvarja električne impulze v mehanske gibe in se tako postopoma vrti z določenim kotom med posameznimi koraki za dokončanje popolne rotacije, se imenuje koračni motor. Kot med koraki vrtenja koračnega motorja se imenuje kot koračnega kota motorja.

Koračni motor
Koračni motorji so glede na navijanje razvrščeni v dve vrsti: enopolni koračni motorji in bipolarni koračni motorji. Enopolni koračni motor se zaradi svoje enostavnosti upravljanja v primerjavi z bipolarnim koračnim motorjem pogosto uporablja v mnogih aplikacijah. Vendar obstajajo različne vrste koračnih motorjev, kot so koračni motor s trajnim magnetom, koračni motor s spremenljivo odpornostjo in hibridni koračni motor.
Nadzor koračnega motorja
Koračni motor je mogoče krmiliti z različnimi tehnikami, vendar tukaj razpravljamo o krmiljenju koračnega motorja z uporabo Mikrokrmilnik Atmega . 89C51 je mikrokrmilnik Družina mikrokrmilnikov 8051 .

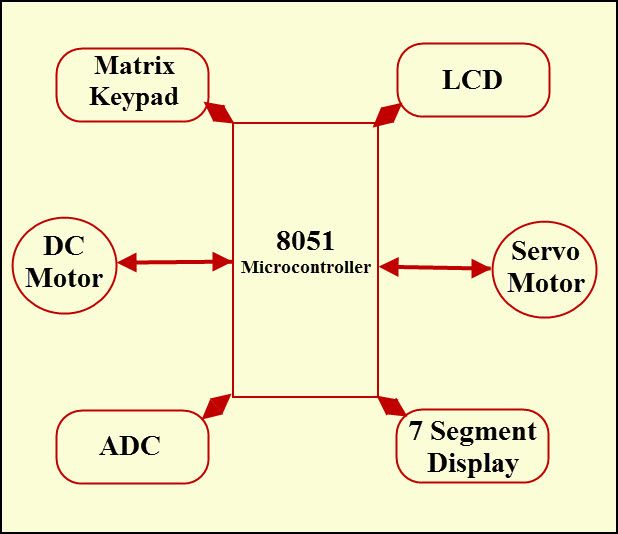
Blok diagram krmiljenja koračnega motorja
Blokovni diagram krmiljenja koračnega motorja z mikrokrmilnikom 8051 je prikazan na sliki z napajanje , mikrokrmilnik, koračni motor in krmilni stikalni bloki.
2 metodi za načrtovanje krmilnega krogotoka koračnega motorja
Krmilnik koračnega motorja je zasnovan z uporabo 8051 mikrokrmilnikov in preklopno vezje za nadzor hitrosti koračnega motorja. Krmilno stikalo lahko zasnujete z uporabo tranzistorska stikala ali z uporabo IC krmilnika koračnega motorja, kot je ULN2003, namesto tranzistorjev.
1. Krmilno vezje z uporabo IC krmilnika koračnega motorja
Enopolni koračni motor lahko zasukate tako, da v zaporedju napajate tuljave statorja. Zaporedje teh napetostnih signalov, ki se nanašajo na tuljave motorja ali vodnike, zadostuje za pogon motorja, zato za nadzor smeri toka v tuljih statorja ni potrebno nobeno vezje gonilnika.

Nadzor koračnega motorja z uporabo IC
Dvofazni koračni motor je sestavljen iz štirih končnih žic, povezanih s tuljavami, in dveh skupnih žic, povezanih z obema končnima vodnikoma, v dve fazi. Skupni točki in končni točki obeh faz sta povezani s tlemi oziroma Vcc in zatiči mikrokrmilnika. Za vrtenje motorja morajo biti končne točke obeh faz pod napetostjo. Na prvo končno točko faze1 deluje predvsem napetost, na prvo končno točko faze2 pa nadaljnja napetost itd.
Koračni motor je mogoče upravljati v različnih načinih, kot so Wave Drive Stepping Mode, Full Drive Stepping Mode in Half Drive Stepping Mode.
Način koračnega valovanja
S ponovitvijo zgornjega zaporedja lahko motor na podlagi izbire končnih točk zasukate v načinu valovnega pogona v smeri urnega kazalca ali v nasprotni smeri urnega kazalca. Spodnja tabela prikazuje zaporedje faz signala za način koračnega valovanja.


Način koračnega valovanja
Način polnega koraka
Z energijo obeh končnih točk različnih faz hkrati dosežemo korak-korak. Tabela prikazuje zaporedje faz signala za način koraka s celotnim pogonom.


Način polnega koraka
Način stopnjevanja s polovičnim pogonom
Kombinacija korakov valov in korakov s polnim pogonom doseže način polovičnega koraka. Tako je v tem načinu stopničasti kot razdeljen na polovico. V tabeli je prikazano zaporedje signalnih faz v načinu polovičnega koraka.


Način stopnjevanja s polovičnim pogonom
Na splošno je korak koraka odvisen od ločljivosti koračnega motorja. Velikost korakov in smer vrtenja sta neposredno sorazmerna številu in vrstnemu redu vhodnega zaporedja. Hitrost vrtenja gredi je odvisna od frekvence vhodnega zaporedja. Navor in število magnetov, ki jih namagnete hkrati, sta sorazmerna.
Koračni motor potrebuje 60mA toka, vendar je največja moč toka mikrokrmilnika Atmega AT89C51 50mA. Torej, krmilnik koračnega motorja I je bil uporabljen za povezovanje koračnega motorja z mikrokrmilnikom za prenos signalov.
2. Krmilno vezje krmilite s pomočjo tranzistorjev
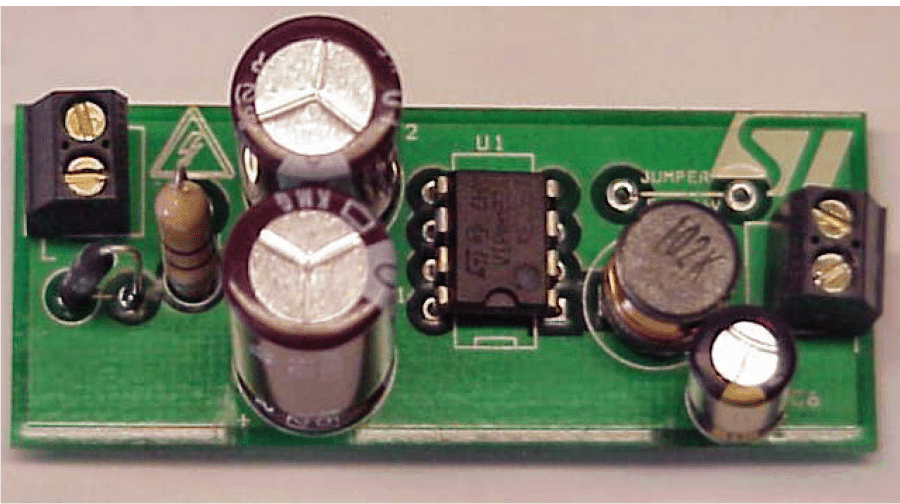
Napajanje vezja lahko dobite tako, da napetost z 230 V znižate na 7,5 V s pomočjo padajočega transformatorja in nato usmerjanje z mostnim usmernikom z diodami . Ta popravljeni izhod se napaja na kondenzator filtra in nato prehaja skozi regulator napetosti. 5V reguliran izhod dobimo iz regulatorja napetosti. Ponastavitveni zatič9 je povezan med kondenzatorjem in uporom.

Krmilno vezje koračnega motorja s pomočjo tranzistorja
Na splošno je koračni motor sestavljen iz štirih tuljav, kot je prikazano na sliki. Torej, za pogon motorja so potrebna štiri vezja voznika motorja. Namesto da bi krmilnik IC koračnega motorja uporabljali za pogon motorja, so kot gonilniška vezja na 21, 22, 23 in 24 nožicah mikrokrmilnika priključeni štirje tranzistorji.
Če tranzistorji začnejo prevodno, bo okoli tuljave ustvarjeno magnetno polje, ki povzroči vrtenje motorja. Hitrost koračnega motorja je neposredno sorazmerna vhodni frekvenci impulza. Kristalni oscilator je priključen na nožici 18 in 19, da zagotavlja urno frekvenco mikrokrmilnika približno 11,019MHz.
Čas izvrševanja katerega koli navodila lahko izračunamo s spodnjo formulo
Čas = ((C * 12)) / f
Kjer je C = število ciklov
In F = kristalna frekvenca
Spodaj je opisano eno od aplikacijskih vezij, ki uporablja koračni motor za vrtljivo sončno ploščo.
Nadzor koračnega motorja z uporabo programiranega mikrokrmilnika 8051
Projekt sončne plošče Sun Tracking je namenjen ustvarjanju največje količine energije s samodejnim nastavljanjem sončne celice. V tem projektu je koračni motor, ki ga krmili programirani mikrokrmilnik družine 8051, povezan s sončno ploščo, da ohranja obraz sončnih kolektorjev vedno pravokoten na sonce.

Nadzor koračnega motorja z mikrokrmilnikom podjetja Edgefxkits.com
The programirani mikrokrmilnik redno generira koračne električne impulze do koračnega motorja za vrtenje sončne celice. Gonilna enota IC se uporablja za pogon koračnega motorja, saj krmilnik ne more zagotoviti moči motorja.
Pustite svoje predloge, povratne informacije in vprašanja, tako da objavite komentarje v spodnjem oddelku za komentarje. Potrudili se bomo, da vam tehnično pomagamo glede tega članka in razvoj električnih in elektronskih projektov z uporabo koračnega motorja.