V članku je razloženo preprosto vezje vozil s sledilnimi črtami, znano tudi kot vozilo za sledenje črt, ki uporablja le nekaj ojačevalnikov in nekaj drugih komponent, brez uporabe zapletenih Arduino ali mikrokrmilnikov.
Kaj je vozilo s sledilnimi črtami
Vozilo s sledilno črto je oblika samodejnega vodenega vozila (AGV), ki vozi tako, da zazna belo črto, narisano ali vgrajeno na tleh. Signal detektorjev ukaže motornim kolesom, da se samodejno obračajo in prilagajajo v skladu s črto, kar daje vtis, da vozilo sledi črti. Od tod tudi privrženec imena.
V bistvu so detektorji v obliki foto upori, kot so LDR ali polprevodniški detektorji svetlobe, kot so foto diode ali foto tranzistorji .
Nekaj takih detektorji svetlobe se uporabljajo za zaznavanje odsevne svetlobe bele črte in vklop tranzistoriziranega vezja ali primerjalnikov na osnovi ojačevalnika, ki nato krmilijo kolesne motorje vozila za manevriranje v skladu z zavoji in krivuljami bele črte na tleh.
Uporaba primerjalnikov oken
V predlaganem vezju vozila s sledilnim vozilom smo uporabili nekaj op amp primerjalniki je vključeval motorje v ravnotežje.
Opcijski ojačevalniki so nameščeni kot okno delničarji . Kot že ime pove, primerjalnik oken primerja vhodni signal z detektorjev z dvema skrajnima referencama napetosti, ki predstavljata praga 'okna'. Dokler je raven vhodnega signala znotraj tega referenčnega praga 'okna', izhod obeh ojačevalnikov ohranja visoko logičnost svojih izhodov.
V primeru, da vhodni signal ponavadi preseže referenčne pragove, se ustrezni izhod opcijskega ojačevalnika zmanjša, kar povzroči nasprotujoče si izhode iz opcijskih ojačevalnikov. To neravnovesje povzroči, da izhodne naprave popravijo situacijo s primernim preklopom tovora.
Kako deluje vezje
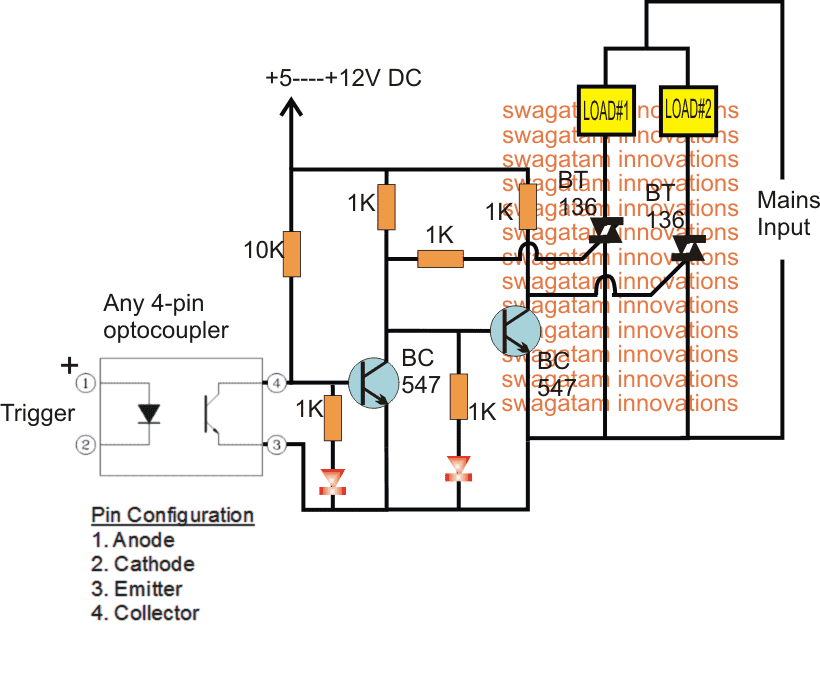
Sklicujoč se na diagram vezja vozila s sledilnimi črtami spodaj, vidimo dva opcijska ojačevalnika, konfigurirana kot primerjalnika oken.

Opcijski ojačevalniki so lahko iz IC LM358 ali LM324
Zgornji opcijski ojačevalnik je ožičen za nadzor zgornje mejne vrednosti, spodnji opcijski pa je povezan za nadzor spodnje mejne vrednosti.
Invertirni vhod op amp A1 in neinvertirni vhod op amp A2 sta vpeta s fiksno referenčno napetostjo
Neinvertirajoči vhod op amp A1 in invertirni vhod op amp A2 sta povezana in se uporabljata za zaznavanje sprememb vhodnega signala iz detektorjev svetlobe.
Dva svetlobno odvisna upora, LDR1 in LDR2, ki delujeta kot svetlobno občutljivi napravi, sta nameščena kot detektorja svetlobe, tako da enakomerno na njih sprejemata odsevano svetlobo od bele črte.
Dokler je svetloba na LDR-jih primerno visoka in enakomerna, ostane pin 3 A1 višji od svojega pin2, saj je LDR1 pritrjen s pozitivno črto. To povzroči, da se njegova proizvodnja poveča.
Prav tako se pin6 A2 drži nižje od pin5 zaradi povezave LDR2 s talno linijo, kar omogoča, da izhod A2 ostane visok.
Z drugimi besedami, ko so LDR enakomerno osvetljeni, so neinvertirni (+) vhodi obeh ojačevalnikov višji od njihovih invertirnih (-) vhodov, zaradi česar se njihovi izhodi visoko.
Z obema izhodoma visoki gonilniki tranzistorjev ohranjajo enakomerno delovanje ustreznih motorjev, kar vozilu omogoča nemoteno vožnjo po ravni črti.
Kako vozilo sledi liniji
Ko naletimo na ukrivljeno belo črto, ena od LDR odstopi od črte, kar povzroči razliko v svetlobi v točki A vezja. To posledično povzroči, da se ustrezni izhod ojačevalnika zmanjša in trenutna zaustavitev ustreznega motorja.
V tej situaciji drugi bočni motor, ki še deluje, prisili vozilo, da se obrne proti upogibnemu kotu črte, kar vrne senčeni LDR nazaj v osvetljeno območje bele črte. Ko se to zgodi, oba motorja spet začneta delovati, kar vozilu omogoča normalno delovanje.
Zgornje samodejno preklapljanje ON / OFF med levim / desnim motorjem kot odziv na svetlobne spremembe upogibnih belih črt prisili vozilo, da se še naprej prilagaja in manevrira v skladu z belo črto.
Kako izdelati vozilo
V enem od mojih prejšnjih prispevkov smo izvedeli, kako a preprosto daljinsko vodeno vozilo je mogoče zgraditi z uporabo le nekaj motorjev, pritrjenih na zadnji rob pravokotne plošče, in par lažnih koles na sprednjem robu plošče.

Tudi za predlagano vezje vozila s sledilnim vozilom uporabljamo podobno konstrukcijo vozila, kot je prikazano na zgornji sliki.
Ureditev je videti precej preprosta, zadnja kolesa so pritrjena z motorji, ki jih upravljajo tranzistorski gonilniki prek izhodov op amp.
Ko vozilo odstopi od črte, razlika v stopnji svetlobe na LDR-jih izklopi enega od opcijskih ojačevalnikov in zaustavi ustrezen motor.
To prisili nasprotni bočni motor, ki deluje, da se obrne proti strani ustavljenega motorja, kar pomeni, da če se zavira levi bočni motor, bo vozilo prisiljeno, da se v isti smeri prilagodi na upogibno črto.
To tudi nakazuje, da je treba levo / desno integracijo motorja z izhodi opcijskega ojačevalnika ustrezno izvesti tako, da sta smer upogibanja črte in zaustavljeni motor na isti strani vozila.
Kako postaviti LDR-je
Ker naj bi LDR (LDR1 in LDR2) enakomerno zaznavala odbojno svetlobo od bele črte, bi morala biti njihova usmeritev pravokotna na dolžino črte, kot je prikazano spodaj.

Tu smo domnevali, da vozilo teče od desne proti levi po določeni črti na isti poti.
Skupna širina LDR-jev mora biti znotraj širine črte.
LDR in LED morajo biti nameščeni na spodnji površini vozila in po možnosti na zadnji strani, tik pod zadnjim kolesom.
Označena LED je bela LED s serijskim uporom 1K. Postavljen mora biti blizu LDR-jev in v sredini, tako da svetloba iz LDR-ja ne pride neposredno do LDR-jev, namesto tega pa mora svetloba doseči LDR-je z odbojem od bele črte pod njimi.
Specifikacije motorja
Motorji so lahko poljubni s ščetkanimi trajnimi magneti, vendar mora biti opremljen z menjalnikom, ki zagotavlja ustrezno počasno in enakomerno gibanje vozila.
Moč motorja mora biti enaka obremenitvi, ki naj bi jo vozilo nosilo. To je mogoče preizkusiti z nekaj praktičnimi eksperimenti.
Kako nastaviti
Če želite nastaviti to vezje vozila s sledilnimi črtami, boste morali razporediti majhen trak bele črte, pobarvane na ravno površino ali bel trak, prilepljen na ravno površino.
Sistem (brez koles) postavite čez črto, kot je prikazano na prejšnjem diagramu, tako da LDR in LED so pravilno nastavljeni znotraj širine črte.
VKLOPITE napajanje, bela LED dioda naj močno osvetli območje pod njim. Prilagodite dve prednastavitvi, dokler se oba motorja hkrati ne vklopite.
Zdaj enoto premaknite nekoliko na desno, tako da se LDR1 premakne iz bele črte.
Levi motor se mora ustaviti. Če se ne, nastavite P1, dokler se levi motor ne ustavi.
Nato enoto rahlo premaknite v levo, da se LDR2 premakne iz bele črte. To bi moralo ustaviti desni bočni motor. Če se ne, nastavite prednastavitev 10k, dokler se desni motor ne ustavi.
S tem bodo dokončani postopki nastavitve, zdaj pa lahko kolesa namestite na motorje in s tem vodenim vozilom samodejno sledite določeni progi na tleh.
White Line vs Black Line
Predlagani sistem vozil s sledilnimi črtami temelji na beli črti, nameščeni na tleh, namesto na črni črti. Prednost uporabe bele črte namesto črne črte je naslednja:
Bela črta je videti bolj elegantno in spodobno v primerjavi s črno črto.
Sledilnik črte, ki temelji na beli črti, lahko deluje tudi v popolni temi ali v slabih svetlobah okolice. Zasnova na osnovi črne svetlobe običajno zahteva zunanjo osvetlitev, da vozilo deluje.
AGV na osnovi bele črte deluje natančneje ne glede na barvo ploščice, razen pri ploščicah, ki so izredno bele ali enakovredne barvi bele črte.
Pretvorba vozila v sledilca črne črte
Kljub zgoraj navedenim prednostim, če uporabnik raje vozi po črni črti, lahko sistem z nekaj hitrimi spremembami predlagane zasnove enostavno preoblikuje.
Uporabnik mora samo zamenjati ali zamenjati povezave vhodnih pinov opcijskih ojačevalnikov s prednastavitvami in odstraniti LED, povezan z LDR-ji.
Prejšnja: 50-vatni sinusni UPS vezje Naprej: Razložena osnovna elektronska vezja - Začetniški vodnik po elektroniki