V tem prispevku raziskujemo, kaj je BLDC motor, nato pa se naučimo o zasnovi brezsobnega vezja gonilnika BLDC motorja.
Ventilatorji CPU BLDC
Ste videli tiste hitro premikajoče se ventilatorje v CPE-jih, stabilizatorjih napetosti, DVD-predvajalnikih in drugi podobni opremi, ki delujejo z največjo učinkovitostjo, porabijo najmanj prostora, toka in so kljub temu sposobni izvesti pomembne operacije, predvidene za določeno opremo?
Da, to so vse moderne različice ventilatorjev BLDC ali brezkrtačni enosmerni motorji, ki so veliko boljši od starih tradicionalnih krtačenih motorjev.

Vljudnost slike: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Vendar pa bo BLDC motor zahteval dovršeno gonilniško vezje, in ja, vsi ti ventilatorji CPU vsebujejo te vgrajene gonilniške module, čeprav se zdi, da jih je mogoče enostavno uporabiti z običajnim enosmernim tokom, sistem pa je že opremljen s pametnim vezjem.
BLDC motorni voznik
Tukaj bomo izvedeli o enem takem pametnem vezju gonilnika BLDC z uporabo enega čipa DRV10963 za vožnjo katerega koli majhnega motorja BLDC z neverjetno učinkovitostjo, kasneje pa bomo v enem od prihajajočih člankov videli, kako je mogoče to vezje IC nadgraditi za celo vožnjo močni visokonapetostni BLDC-ji, kakršni so uporablja se v quadcopterjih.
Pred tem pa bi bilo zanimivo izvedeti nekaj o BLDC motorjih.
Razlika med krtačenimi in brezkrtačnimi enosmernimi motorji
Razlika med krtačenim motorjem in brezkrtačnim motorjem ter stopnja učinkovitosti je precej očitna.
Ker imajo krtačeni motorji navitje armaturo, ki se sama premika med magneti, mora uporabiti 'ščetke' (drgnjenje kontaktov), tako da lahko terminali gibljivih tuljav neprekinjeno sprejemajo napajalno napetost, ne da bi morali sami doseči vir napajanja, ki bi sicer nemogoče in ogrožajo operacije.
V brezkrtačnem motorju se tuljava ali navitje nikoli ne premika in je konstantna, tu rotor nosi niz stalnih magnetov in se vrti pod vplivom magnetnih tokov okoliškega navitja.
Ker je magnet brez vseh težav in lahko deluje brez vključitve terminalov za upravljanje ali sprejemanje moči, se lahko brez napora vrti s hitro hitrostjo in tako rekoč na brezšumni ravni.
Toda tu je ulov. Da bi se elektromagnet lahko odzval na pretoke trajnega magneta, mora biti stalen premik magnetne faze ali polov, tako da sta nasprotnika sposobna nenehno reagirati in iti skozi nasprotno silo, s čimer sprosti potrebno torzijsko silo nad rotor in izvedite vrtenje z nastalim navorom.
V brušenem motorju je to lažje zaradi samonastavljive narave armaturne tuljave, ki se lahko vrti in ustvarja samozadostno nasprotno magnetno silo ter se vrti brez kakršnih koli zunanjih impulzov ali obdelave.
Vendar v BLDC to postane problem, saj magnetni rotor ostane 'brez znaka' in zahteva navit magnetnega ukaza od navitja, da se lahko smiselno vrti in ne naključno.
Ravno zato vsi BLDC motorji obvezno zahtevajo vezje gonilnika motorja za vodenje treh različnih sklopov navijanja znotraj motorja.
Tako so vsi BLDC v bistvu trifazni motorji in obvezno zahtevajo 3 faze za ustvarjanje vrtilnega momenta na rotorju.
Kaj počnejo gonilniki BLDC brez senzorjev
Gonilno vezje brez senzorja BLDC preprosto zaporedoma elektrificira 3 sklope navitij, tako da lahko magnetni rotor prehaja skozi konstantno nasprotno silo, ki motorju omogoča trajni navor in vrtilno silo.
Toda tega zaporednega napajanja navitja BLDC po vezju ni mogoče samo naključno nastaviti, mora biti v tandemu ali kot odziv na položaj vrtenja rotorskega magneta, sicer bi lahko izvedba šla v mrežo in bomo lahko priča gredi motorja (rotor ), ki se vrti naključno, to je sunkovito gibanje v smeri urnega kazalca in v nasprotni smeri urnega kazalca brez smiselnega vrtenja.
Zakaj se senzorji uporabljajo v BLDC motorjih
Zato uvajamo senzorje, nameščene znotraj številnih različic motorjev BLDC, ti senzorji (tipično senzorji Hallovega učinka) 'razumejo' spreminjajoči se položaj magnetnih polov rotorskega magneta, priloženemu vezju procesorja naročijo, da elektrificira ustrezno navitje in izvede rotacijsko gibanje z optimalnim navorom.
Senzorji Hallovega učinka se učinkovito uporabljajo v večini BLDC motorjev, ki so razmeroma večje velikosti, toda za manjše motorje, kot so ventilatorji CPU, pogoni CPU, DVD predvajalniki, majhni izpušni ventilatorji, lahko senzorji Hall učinka postanejo neprimerni in zato je uveden alternativni pristop brez senzorjev.
To vključuje izkoriščanje povratne EMF električne energije, ki je lastna navitju, ki se vzame kot referenčni vir za obdelavo in elektrifikacijo ustreznih sklopov navijanja in izvajanje vrtilnega momenta.

Simulacija gibanja rotorja BLDC
V zgornji surovi simulaciji si lahko predstavimo, kako se sproščeni EMF vzame za referenco in uporablja za ustvarjanje zaporednih impulzov za naslednje sklope navijanja, ki nalagajo vrtilni moment na osrednji rotor trajnega magneta. Simulacija morda ni natančna replikacija, kljub temu pa daje grobo predstavo o principu dela.
Zanimivo je omeniti, da se impulz preklopi, ko je N / S magneta točno v središču jedra navitja, kar omogoča, da se navitje bodisi napaja kot N ali S, odvisno od polarnosti impulza, in povzroči privlačnost in odbijanje sila na N / S magnete, s čimer se ustvari potrebni navor na največji možni ravni.
To pa postane mogoče zaradi zadnjega EMF, ki se sprosti s preklopom prejšnjega navitja.
Zgornja razprava pojasnjuje delovanje senzorja brez BLDC motorja, zdaj se naučimo, kako določeno vezje obravnava zgornjo zapleteno izvedbo 3-faznega preklopa
Gonilnik BLDC DRV10963
Po nekaj Googlanju sem našel to gonilniško vezje BLDC brez senzorja z enim čipom DRV10963, ki uporablja zanemarljivo veliko delov v konfiguraciji, vendar je sposoben izvesti dodelano obdelavo za predvidene ukrepe.
DRV10963 je najsodobnejši čip, ki je posebej zasnovan za delovanje motorjev BLDC brez senzorjev, tako da zgolj predvideva zadnjo EMF od navitja motorja in poda natančen ukaz nad navitjem ter doseže optimalen vrtilni moment nad rotorjem.
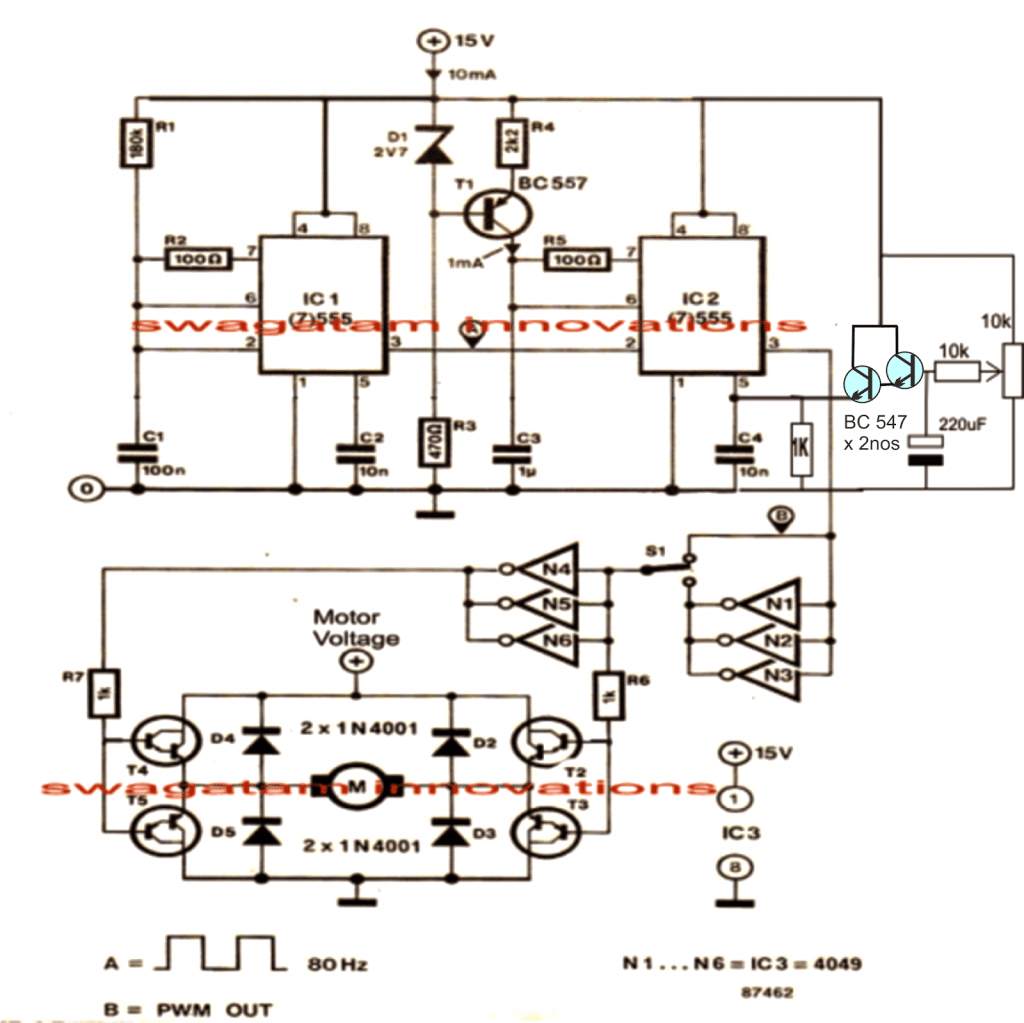
Shema vezja

Zgornja slika prikazuje preprosto postavitev vezja, ki očitno ne vključuje ničesar drugega kot sam IC.
Različni izpusti so namenjeni za izvajanje določenih funkcij, kot so krmiljenje hitrosti PWM motorja, krmiljenje smeri itd., Tako da ustrezne izvlečke preprosto napajate z navedenimi podatki iz zunanjega vira.
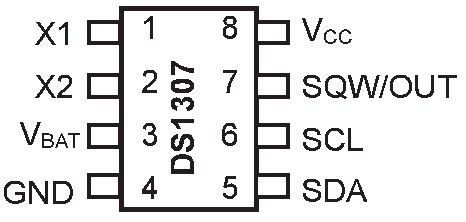
Naslednja slika prikazuje paket čipa, ki je videti kot 10-polni DIL IC, različne funkcije pinout-a istega pa lahko preučimo iz podatkov, kot je prikazano v diagramu:

Sklic na shemo vezja predlaganega vezja gonilnika BLDC brez senzorja kot je bilo predstavljeno v prejšnjem članku in tudi slika čipa zgoraj, lahko podrobnosti o pinouts razumemo na naslednji način:
Podrobnosti IC Pinout
FG = To je zatič (izhod) indikatorja hitrosti motorja, ki je v načinu odprtega kolektorja nameščen z notranjim BJT.
Odprti kolektor pomeni, da bo izhod na tem izhodu ustvaril negativne PWM-je s pomočjo ponikanja logike po odprtem kolektorju in tleh, tako da bo uporabnik za pridobitev veljavnega odčitka moral na ta odprt kolektor in pozitiven napajalnik priključiti vlečni upor (5V ) za doseganje indikacije hitrosti na tem izhodu.
FGS = To je vhod izbirnika kazalnika hitrosti, kar pomeni, da je tukaj mogoče vklopiti logiko visoka ali nizka za vklop / izklop indikatorskega zatiča FG.
Vcc = pozitivna napajalna napetost IC, ki omogoča njeno delovanje, ne sme presegati 5V.
W, U in V so trifazni izhodi za BLDC motor, ki naj bi deloval prek tega IC. To deluje tudi kot vhodi za zaznavanje impulzov EMF motorja za zahtevano sinhronizirano preklapljanje tuljav motorja.
GND = nanaša se na negativni napajalni pinout IC glede na Vdd pin.
FR = Pomaga pri izbiri ali ukazu smeri motorja in se lahko dinamično spremeni kadar koli, ko se sistem napaja, preprosto z uvedbo visoke ali nizke logike zunanjega sistema.
PWM = Označuje krmilni vhod PWM iz zunanji generator valov PWM.
Ta vhod PWM je lahko spremenljiv za izvajanje želenega nadzora hitrosti priključenega BLDC motorja.
Črtast presledek na sredini čipa označuje toplotno blazinico, ki jo je mogoče vpeti ali pritisniti s hladilnikom, da se potopi morebitno ustvarjanje toplote na čipu, medtem ko se ta uporablja z obremenjenim BLDC motorjem.
Zgornja razprava navaja pinout ali podrobnosti o povezavi čip gonilnika motorja BLDC brez senzorja DRV10963, zdaj pa podrobno analizirajmo notranjo konfiguracijo in delovanje čipa s pomočjo naslednjih točk:
Opis naprave
DRV10963 je 3-fazni elektromotor brez senzorja z vgrajenimi močnostnimi MOSFET-ji (3-fazni H-premoščeni). Prilagojen je za večjo produktivnost, manjši hrup in minimalne funkcije motornega pogona s številom sekundarnih materialov. Ekskluzivna sinusna shema upravljanja brez oken Iess 180 ° za sinusoido zagotavlja brezšumno učinkovitost vožnje z avtomobilom.
DRV10963, sestavljen iz funkcije pametnega zaznavanja ključavnice, skupaj z dodatnimi vgrajenimi varnostnimi vezji za doseganje varne zmogljivosti. DRV10963 lahko najdete v toplotno učinkoviti 10-pinski embalaži USON z nepokrito termo mat.
Kako deluje IC
Izdelek DRV10963 je trifazni motor brez senzorja z vgrajenimi MOSFET-ji z močjo
ustvarjen posebej za vrhunske zmogljivosti, zmanjšano resonanco in minimalno število površinskih funkcij motornega pogona.
Glavni načrt za sinusoidno krmiljenje 180 ° brez senzorjev predstavlja brezšumno delovanje motorja z ohranjanjem nominalnega valovanja navora z električnim spodbujanjem. Po inicializaciji bo naprava DRV10963 motor obrnila v smeri, ki je navedena skozi vhodni zatič FR.
Čip DRV10963 bo deloval s 3-faznim BLDC motorjem, pri čemer bo uporabil sinusni načrt nadzora.
Pomen uporabljenih sinusoidnih faznih napetosti je odvisen od delovnega cikla PWM zatiča. Medtem ko se motor premika, DRV10963 IC posreduje podatke o hitrosti na zatiču FG.
Enota DRV10963 je sestavljena iz funkcije zaznavanja pametne ključavnice. V takem primeru, ko motor zavira zaradi tujega pritiska, bo program odkril težavo z zaklepanjem in bo skupaj z motorjem sprejel ukrepe za samostojno zaščito.
Podroben postopek vezja za zaklepanje je podrobno prikazan v Zaznavanju zaklepanja. DRV10963 IC poleg tega vključuje več vgrajenih varnostnih vezij, na primer nad tokovno zaščito, zaščito pred napetostjo, pod napetostjo in zaščito pred temperaturo.
Značilna razlaga
Vnos in nadzor hitrosti
DRV10963 predstavlja 3-fazne PWM izhode s 25 kl-lz, ki imajo lahko standardni odstotek sinusnih valovnih oblik iz faze v fazo. Če se določi kateri koli cikel glede na zemljo, je verjetno, da je zaznana valovna oblika zaščitena s PWM sinusoida v kombinaciji s harmoniki 3. reda, kot je prikazano na sliki 2.

Ta strategija kodiranja poenostavlja specifikacije gonilnika, ker bo verjetno pogosto enofazni izhod, ki bi bil lahko enak nič.
Izhodna amplituda se spreminja glede na napajalno napetost (VCC) in predpisani delovni cikel PWM (PWM), kot je opredeljen v enačbi 1 in poudarjen na sliki 3. Optimalna amplituda se izvede, ko je predpisani delovni cikel PWM 100 ODST.
Vphpk = PWMdc>

Hitrost motorja se ne regulira neposredno z uporabo PWM za uravnavanje amplitude faznih napetosti, ki se uporabljajo za motor.
Delovni cikel vhoda PWM se spremeni v 9-bitno digitalno količino (od 0 do 511).
Ločljivost uredbe je 1/512 == 0,2%. Analizator delovnega cikla olajša začetno izmenjavo naročil med vhodnim delovnim ciklom in 9-bitno digitalno sliko.
To je poudarjeno na sliki 4, na kateri je r = 80 ms.

Učinkovitost izmenjave med urejenim delovnim ciklom PWM in največjo amplitudo izhoda je v napravi DRV10963 spremenljiva.
Največja amplituda izida je obravnavana v enačbi 1, ko je ukaz PWM> minimalni delujoči delovni cikel. Najnižji obratovalni cikel pogosto nastavimo na 13%, 10%, 5% ali brez omejitve z nastavitvijo OTP (MINOP_DC1: 0).
Tabela 1 prikazuje priporočene konfiguracije za minimalni obratovalni cikel delovanja.
Kadar je delovni cikel, za katerega je določen PWM, manjši od najnižje delujočega delovnega cikla in večji od 1,5%, bo izhod reguliran pri minimalnem obratovalnem delovnem ciklu. Ko je vhodni delovni cikel manjši od 1,5%, naprava DRV10963 verjetno ne bo zagnala izhoda in bo poslana v stanje pripravljenosti.
To lahko ponazorimo na sliki 6.

Rotacijske konfiguracije
DRV10963 bo zagnal motor s tehniko, ki je podrobno opisana na sliki 7.

Graf inicializacije motorja je sestavljen iz možnosti, ki jih je mogoče konfigurirati v napravi, za omejitev prehoda v zaprti zanki (HOW.), Čas poravnave (TAHQH) in hitrost pospeševanja (RACE).
Za uravnavanje rotorja na komutacijsko logiko DRV10963 izvede x% delovni cikel na fazah V in W hkrati krmiljenje faze U na GND.
Ta scenarij traja TAIign sekund. Pomembnost x% se ugotovi z napetostjo VCC (kot je prikazano v tabeli 2), da se ohrani dovolj vrtilnega momenta pri različnih različnih napajalnih napetostih.
Ko se zaporedje poravnave zaključi, je motor prisiljen pospešiti z vstavljanjem sinusoidnih faznih napetosti z najvišjimi nivoji, kot je prikazano v tabeli 2, in s povečevanjem s pomočjo komutacijskega območja s hitrostjo razširjanja, ki jo predstavlja RACE, dokler raven komutacije ne naraste na Hom , Hz.
Takoj, ko je dosežena ta omejitev, se DRV’l0963 pretvori v način z zaprto zanko, pri čemer vgrajeni nadzorni algoritem prepozna napredovanje komutacijskega pogona, medtem ko uporabljeno napetost prepozna vhodni delovni cikel PWM.
Omejitev prehoda odprte zanke za zapiranje zanke (Hom), čas poravnave (TAHQH) in hitrost pospeševanja (RACE) lahko nastavite s konfiguracijami OTP.
Izbira praga primopredaje (KAKO,) je običajno odobrena s preskusi in napakami. Cilj bi bil dati prednost toleranci prenosa, ki bi bila čim manj izvedljiva in omogoča motorju, da brez truda in zvesto preklopi med pospeševanjem odprte zanke in pospeševanjem zaprte zanke.
Običajno motorji z večjo hitrostjo (največja hitrost) zahtevajo večjo toleranco predaje, ker motorji z večjo hitrostjo vsebujejo znižano Kt in s tem cenejšo BEMF.
Tabela 3 prikazuje nastavljive nastavitve tolerance predaje. Najvišje hitrosti v električnem Hz so dokazane kot referenca za pomoč pri izbiri želene hitrosti prenosa za določeno oddajo.

Izbira časa poravnave (TAHQH) in stopnje pospeševanja (RACE) je lahko odvisna celo od preizkusov poskusov in napak.
Motorji z večjo vztrajnostjo običajno zahtevajo podaljšan čas poravnave in počasnejšo hitrost pospeševanja v nasprotju z motorji z nizko vztrajnostjo, ki običajno zahtevajo krajši čas poravnave skupaj s hitrejšim odstotkom pospeševanja. Programske kompromise je treba izvesti, da bi izkoristili stabilnost zagona, namesto da bi se vrteli navzgor.
TI podpira začetek odločitve o manj intenzivnih konfiguracijah (počasnejši RACE in pomemben Tmign), da se ogrozi čas navora v podporo največji stopnji izpolnjevanja.
Takoj, ko je oprema potrjena za vestno izvajanje, se lahko uporabijo zelo močne konfiguracije (večji RACC in manjši TAHQH) za zmanjšanje trenutka vklopa in hkrati previdno sledenje stopnji izpolnjevanja.
Tabela 4 prikazuje nastavljive nastavitve za TA'g ,, in RACE.

Preostali del obrazložitve v zvezi s tem brezžičnim BLDC IC je priložen v tem izvirnem obrazcu
Prosim, komentirajte, če želite izvedeti več o zgoraj omenjenih podrobnostih vezja gonilnika motorja BLDC brez senzorja
Prejšnja: 12V LED nahrbtnik Naprej: Daljinsko krmiljenje Quadcopter brez MCU