Čeprav lahko vezja za daljinski upravljalnik quadcopter zelo enostavno nabavite s trga ali katere koli spletne trgovine, navdušen elektronski ljubitelj nikoli ne sme izvedeti, kako dejansko te funkcije delujejo in ali jih je mogoče zgraditi doma ali ne?
V tem članku bomo poskušali zgraditi preprosto vezje daljinskega upravljalnika quadcopter z uporabo ločenih komponent in uporabo RF daljinskih upravljalnih modulov in brez vključevanja kompleksnih vezij, ki temeljijo na MCU.
Vodič po korakih bo zainteresiranim ljubiteljem dejansko dal razumeti, kako preprosto je mogoče quadcopter nadzorovati s konceptom PWM.
Že smo se naučili osnove kvadrokopterja , zdaj raziščimo odsek daljinskega upravljalnika, ki bo na koncu pomagal upravljati enoto na daljavo.
Zahtevani osnovni moduli
Glavne sestavine, ki bodo morda potrebne za projekt, so navedene pod:
V osnovi bomo potrebovali naslednje tri faze vezja:
1) 4-smerni RF daljinski upravljalnik Tx, Rx moduli - 1 set
2) Vezja generatorja PWM na osnovi IC 555 - 4nos
3) Vezja krmilnika BLDC motorja - 4nos
Ker gre za domačo različico, lahko s predlagano zasnovo pričakujemo nekatere neučinkovitosti, na primer odsotnost krmilnih palic za krmilnike, ki jih nadomestimo s posodami ali potenciometri, kljub temu pa lahko pričakujemo, da bo delovna sposobnost sistema enaka strokovne enote.
Ročni oddajnik PWM bo v osnovi sestavljal daljinski modul Tx, ki je integriran s 4 diskretnimi krmilnimi vezji PWM, medtem ko bo quadcopter moral biti zaprt z 1 Rx vezjem, integriranim s 4 diskretnimi vezji BLDC gonilnika.
Začnimo z vezji motorja quadcopter in si oglejmo, kako je treba krmilnik motorja BLDC konfigurirati in pritrditi z vezjem Rx.
Krog sprejemnika PWM sprejemnika
V enem od prejšnjih prispevkov smo izvedeli, kako je mogoče z uporabo enega samega čipa zgraditi vsestranski krmilnik motorja BLDC, vendar ta zasnova ni zasnovana za upravljanje sorazmerno težjih motorjev kvadrokopterja, zato morda ni primerna za sedanjo aplikacijo.
Možnost 'velikega brata' za zgornje vezje je na srečo na voljo in postane popolnoma primerna za pogon motorjev s kvadrokopterji. Zahvaljujemo se podjetju TEXAS INSTRUMENTS, ker ste nam zagotovili tako čudovite module, ki jih določajo posamezne vezje.
Če želite izvedeti več o tem zelo aktualnem IC-ju gonilnika BLDC, se lahko obrnete na naslednji tabelarni list pdf istega
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Spodnja nastavitev prikazuje celotno shemo vezja krmilnika gonilnika motorja quadcopter z uporabo DRV11873 IC, ki je samostojni nizkonapetostni BLDC motorni krog, sestavljen iz vseh zahtevanih zaščitnih lastnosti, kot so zaščita pred preobremenitvijo, toplotna zaščita itd. Ta modul v bistvu tvori ESC za našo sedanjo enoto quadcopter.
Za več informacij o tej zasnovi in podrobnostih o PCB lahko preberete spodnji izvirni dokument:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Kako deluje
Izvlečki FS in FG IC so namenjeni izboljšanju IC z dodanimi krmilnimi elementi prek zunanjih vezij, ker teh lastnosti ne uporabljamo v svoji zasnovi, lahko ti zatiči ostanejo neuporabljeni in prekinjeni na pozitivno črto prek upora 100K.
RD-pinout IC določa smer vrtenja motorja. Priključitev tega zatiča na Vcc prek upora 100K omogoča vrtenje motorja v nasprotni smeri urnega kazalca, medtem ko ostane nepovezan, deluje nasprotno in omogoča vrtenje motorja v smeri urinega kazalca.
Pin # 16 je vhod PWM, ki se uporablja za vbrizgavanje vhoda PWM iz zunanjega vira, pri čemer spreminjanje delovnega cikla PWM ustrezno spreminja hitrost motorja.
Izpusti FR, CS so prav tako nepomembni za potrebe, zato jih lahko pustimo neuporabljene, kot je prikazano na diagramu, in prek 100K upora zaključimo na pozitivno črto.
Izhodi U, V, W so izhodi motorja, ki jih je treba povezati z ustreznim trifaznim motorjem quadcopter BLDC.
Izhod COM je namenjen priključitvi skupne žice 3-faznega motorja; če vaš motor nima skupne žice, ga lahko preprosto simulirate tako, da priključite 3 nosilce 2k2 uporov na zatiče U, W, W in nato združite njihove skupne žice konča z zatičem COM na IC.
Shema prikazuje tudi IC 555, konfiguriran v načinu stabilnega vezja PWM. Ta postane del modula vezja in izhod PWM iz njegovega zatiča št. 7 je viden, povezan s PWM vhodom vezja IC DRV, da se tako sprožijo 4 motorji s konstantno osnovno hitrostjo in motorju omogoči stalno lebdenje hitrost na določenem mestu.
S tem je zaključeno glavno vezje ELC ali vezje gonilnika BLDC za zasnovo kvadrokopterja.
Za štiri motorje v naši zasnovi quadcopterja potrebujemo štiri take module.
To pomeni, da bodo morale biti 4 take DRV IC skupaj s stopnjo PWM IC 555 povezane z vsakim od 4 motorjev quadcopterja.
Ti moduli bodo zagotovili, da bodo običajno vsi 4 motorji nastavljeni na vnaprej določeno hitrost z uporabo fiksnega in enakega PWM signala na vsako od ustreznih IC-krmilnikov DRV.
Zdaj pa se naučimo, kako se lahko PWM spremeni z daljinskim upravljalnikom, da se s pomočjo običajne 4-kanalne prenosne enote spremeni hitrost posameznega motorja.
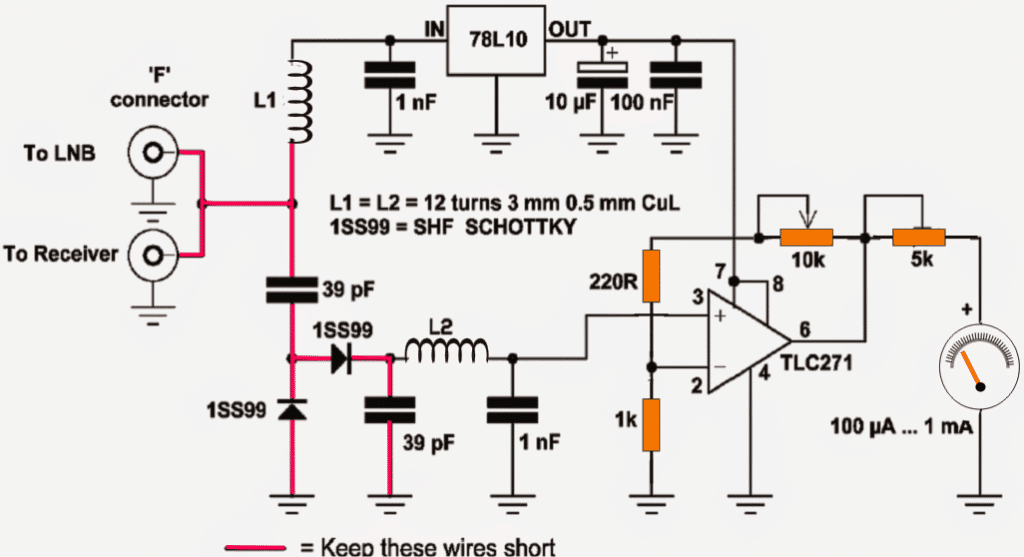
Modul RF-sprejemnika (PWM dekoder)

Zgornje vezje prikazuje sprejemno RF vezje na daljavo, ki naj bi bilo nameščeno v kvadrokopterju za sprejem zunanjih brezžičnih podatkov PWM iz uporabniške daljinske prenosne slušalke, nato pa signale ustrezno obdela za napajanje spremljajočih modulov krmilnika DRV, kot je razloženo v prejšnji oddelek.
Štiri izhode, imenovane PWM # 1… .PWM # 4, je treba povezati s PWM pinom 15 na DRV IC, kot je prikazano v prejšnjem diagramu.
Ti izhodi PWM iz RF sprejemne enote se aktivirajo vsakič, ko uporabnik v prenosni prenosni enoti pritisne ustrezen gumb.
Kako mora biti RF oddajnik ožičen (PWM dajalnik)
V zgornjem poglavju smo razpravljali o Rx ali vezju oddaljenega sprejemnika in o tem, kako je treba njegove 4 izhode povezati z gonilnimi moduli motorja quadcopter.
Tu vidimo, kako je treba ustvariti preprost RF oddajnik in ga povezati s PWM vezji za brezžični prenos podatkov PWM na sprejemniško enoto quadcopter, tako da hitrosti posameznega motorja nadzorujemo preprosto s pritiskom na gumb, kar na koncu povzroči quadcopter za spreminjanje smeri ali njene hitrosti, v skladu s preferencami uporabnikov.

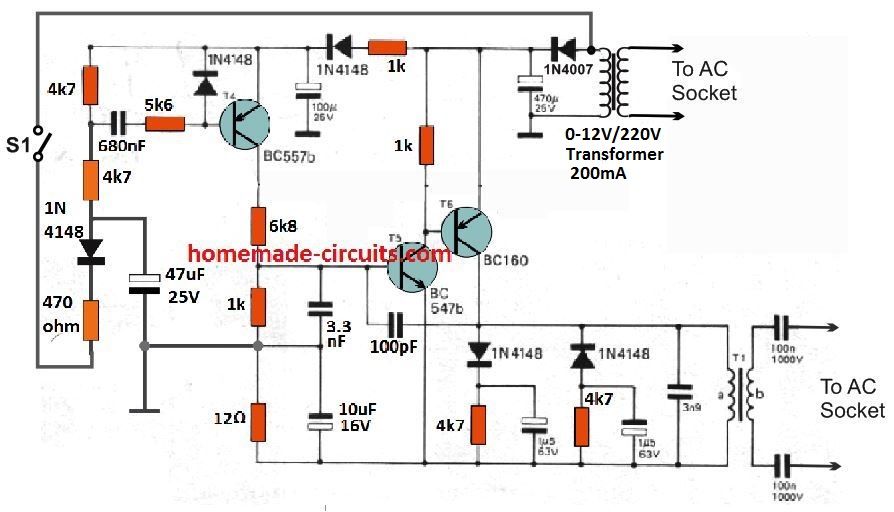
Zgoraj prikazano vezje prikazuje podrobnosti o ožičenju oddajniškega modula. Ideja je videti precej preprosta, glavno oddajniško vezje tvori čip TSW434, ki prenaša kodirane PWM signale v ozračje, in HT12E, ki postane odgovoren za dovajanje kodiranih signalov na čip TSW.
Signali PWM se generirajo s 4 ločenimi stopnjami vezja IC 555, ki so lahko enake tisti, ki je bila prej obravnavana v modulu krmilnika DRV.
Vsebino PWM na 4 IC-jih je mogoče zaključiti na ustrezne izrezke dajalnika IC HT12E s pomočjo 4 diskretnih gumbov, označenih kot SW1 ---- SW4.
Vsak od teh gumbov ustreza in preklaplja enak pinout sprejemnega modula, o katerem smo že govorili in ga označili kot PWM # 1, PWM # 2 ... ..PWM # 4.
Pomen pritiska na SW1 lahko povzroči, da je izhod PWM # 1 sprejemne enote aktiven, ta pa bo pinout začel dovajati prejete dekodirane signale PWM od oddajnika na pripadajoči DRV modul in posledično ustrezni motor ustrezno spreminjal svojo hitrost.
Podobno lahko pritisnete SW2,3,4 za vplivanje na hitrost ostalih 3 motorjev quadcopter, kot želijo uporabniki.
Vezje PWM IC 555
4 vezja PWM, prikazana v zgornji prenosni enoti RF oddajnika, je mogoče zgraditi tako, da se sklicujete na naslednji diagram, ki je popolnoma podoben tistemu, ki je bil prikazan v našem ESV vezju krmilnika DRV.

Ne pozabite, da je lonec 5K lahko v obliki običajnega lonca in ga lahko dodatno uporabite z gumbi za izbiro različnih hitrosti na ustreznih motorjih.
Pomen, če pritisnete izbrani gumb in hkrati premikate ustrezen 5KPWMpot, lahko povzroči, da quadcopter poveča ali zmanjša svojo hitrost v predvideni smeri.
Druga možnost je, da lahko PWM sprva nastavite na neko višjo ali nižjo raven in nato pritisnete ustrezni gumb, da omogočite ustreznemu motorju quadcopter doseči želeno hitrost, kot je nastavljena PWM.
Specifikacija motorja Quadcopter
Zgoraj razloženo vezje daljinskega upravljalnika Qiadcopter je namenjeno samo za prikaz in ga ni mogoče uporabljati za dvigovanje bremen ali kamere. To pomeni, da bi morali biti motorji, uporabljeni pri načrtovanju, po možnosti nizkotokovni.
IC DRV11873 je zasnovan za delovanje motorjev z nazivno močjo 15 V, 1,5 ampera ali približno 20 vatov ... tako da lahko v ta namen uporabite kateri koli 3-fazni BLDC motor z močjo od 15 do 30 vatov.
Baterija za to zasnovo kvadrokopterja je lahko katera koli 12v Lipo pr Li-ion baterija, ki lahko napaja 15V maksimum pri 1,5 ampera neprekinjenega toka.
Podrobnosti o specifikacijah
Miniaturni enosmerni motor brez krtačk 1306N
Tip: mikro motor
Konstrukcija: Stalni magnet
Komutacija: brezkrtačna
Hitrost (vrt / min): 2200 vrt / min
Neprekinjen tok (A): 1,5 ~ 2,6A
Napetost (V): 7,4 ~ 11,1V
miniaturni enosmerni motor: AX-1306N
teža: 8g
premer gredi: 1,5 mm
Baterija LI-PO: 2-3 s
delovni tok: 1,5 ~ 2,6A
največja učinkovitost: 67%

Prejšnja: Gonilnik vezja motorja BLDC brez senzorja Naprej: Krog krmilnika grelnika s pomočjo tipk