Prispevek govori o elektronskem regulatorju hitrosti motorja ali vezju krmilnika z uporabo povratne signalne zanke RPM skozi mrežo senzorjev učinka Hall. Idejo je zahteval gospod Imsa Naga.
Cilji in zahteve vezja
- Najlepša hvala za vaš čas. Verjamem, da bi bilo to vezje primerno za enofazno napajanje. Moj alternator je trifazni 7KvA in rad bi ga združil z dizelskim motorjem, ki ima namesto regulatorja hitrosti pospeševalnik.
- Želel bi izvesti - 'ELEKTRONSKI UPRAVLJALNIK HITROSTI MOTORJA', ki bi verjetno imel elektronski servo krmiljeni mehanizem, kot je vezje senzorja hitrosti (senzor vrtljajev motorja) za pogon servo motorja za aktiviranje pospeševalnega mehanizma za vzdrževanje konstantno število vrtljajev motorja glede na obremenitev, ki deluje na alternator.
- To bi pomagalo pri ohranjanju frekvence in napetosti generatorja. Za mehanski vidik bi lahko poskrbel, če prijazno oblikujete vezje za krmiljenje servo motorja tako, da ga lahko glede na spremembo vrtljajev motorja obrnete v katero koli smer. Najlepša hvala v pričakovanju.
Shema vezja

OPOMBA: MOTOR JE LAHKO NADOMESTITI Z VLOŽENIM 12-V VLOŽENIM SOLENOIDOM
Dizajn
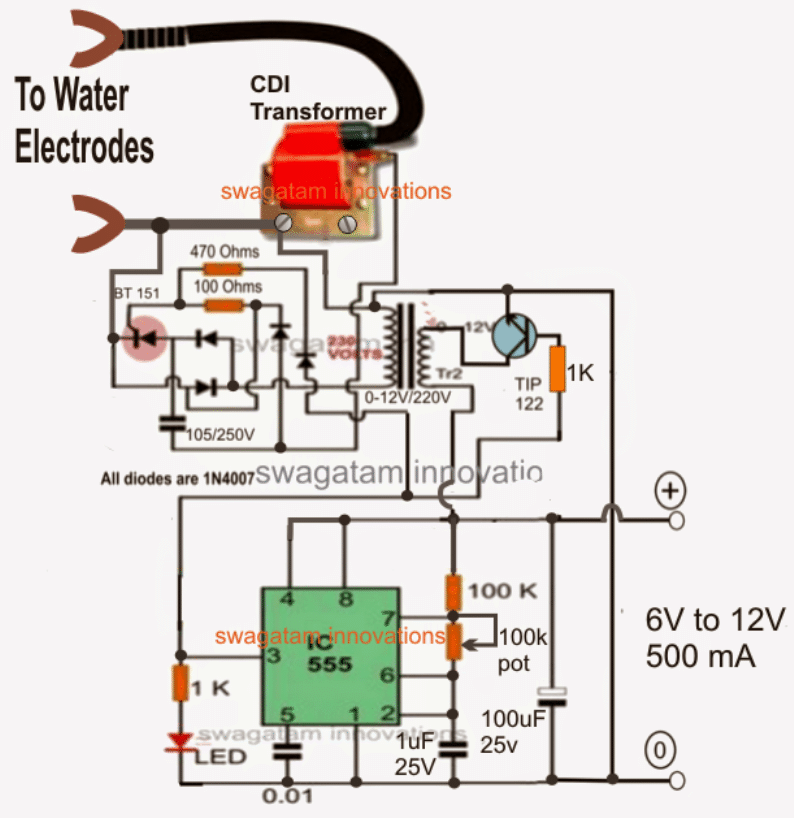
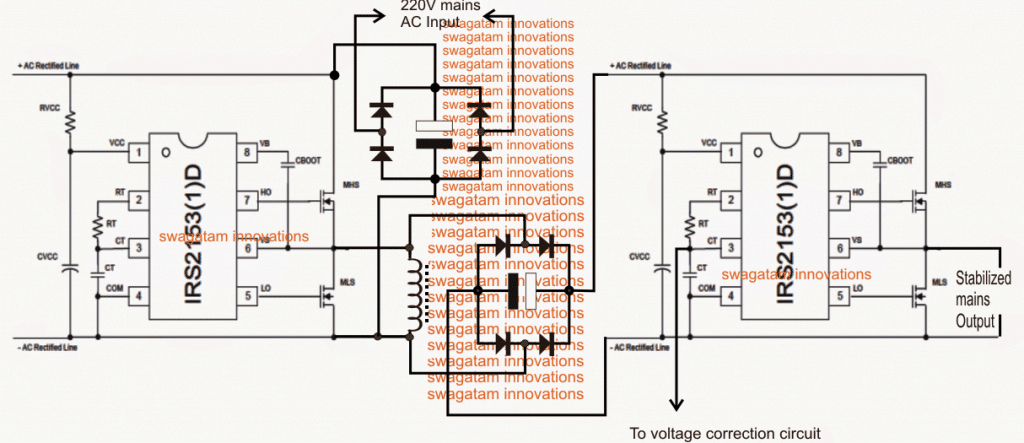
Vezje regulatorja vrtljajev ali krmilnika vrtljajev dizelskega motorja je prikazano na zgornji sliki z uporabo povratnega procesorja RPM ali a vezje tahometra
Leva stran IC1 555 stopnice tvori preprosto vezje tahometra, ki je konfigurirano z a Hallov senzor učinka pritrjen z obremenitvenim kolesom motorja za zaznavanje njegovega števila vrtljajev.
RPM se pretvori v sorazmerno spreminjajočo se hitrost ali frekvenco impulzov in se uporabi na dnu BJT za preklapljanje nožice št. 2 IC1.
Delovanje vezja
IC1 je v osnovi nameščen v monostabilnem načinu, zaradi česar njegov izhod generira sorazmerno prilagodljivo stikalo za vklop / izklop, katerega obdobje se nastavi s prikazanim 1M loncem.
Izhod iz IC1, ki prenaša vsebino RPM v obliki podaljšanih časovnih impulzov, ustrezno gladi integratorska stopnja, sestavljena iz nekaj komponent RC, ki uporabljajo upor 1K, 10K in 22uF. 2.2uF kondenzatorji.
Ta stopnja pretvori monostabilne grobe podatke o vrtljajih v razmeroma gladko spreminjajočo se ali eksponentno spreminjajočo se napetost.
Ta eksponentno spreminjajoča se napetost je vidna v povezavi z zatičem št. 5 naslednje stopnje IC2 555, konfigurirane kot nestabilno vezje.
Funkcija te naprave je ustvariti zelo ozko ali nizko izhodno vrednost PWM na svojem zatiču št. 3 v običajnih pogojih delovanja.
Tu se običajno obratovalno stanje nanaša na situacijo, ko je zaznani vrtljaji na minuto znotraj določene meje in če pin 5 IC2 ne dobi nobenega napetostnega vhoda od sledilca oddajnika. Ta nizek izhod PWM je mogoče izvesti z ustreznim prilagajanjem dveh 100k uporov in kondenzatorja 1uF, povezanih z zatičem IC2 # 6/2 in pin # 7.
Ta nizki PWM iz zatiča št. 3 IC2 ne more dovolj močno preklopiti TIP122, zato navedeni sklop motornih koles ne more dobiti zahtevanega zagona in zato ostane deaktiviran.
Ko pa se vrtljaji RPM začnejo dvigovati, začne tahometer proizvajati eksponentno višje napetosti, kar posledično povzroči sorazmerno naraščajočo napetost na zatiču št. 5 IC2.
To omogoča TIP122, da deluje bolj trdo, in priključeni motor dobi dovolj navora, tako da začne pritisniti pritrjeni pedal za plin v način zaviranja.
Ta postopek prisili dizelski motor, da zmanjša število vrtljajev, kar ustrezno povzroči, da se tahometer in stopnje PWM povrnejo v prvotne pogoje, in da zahteva zahtevano nadzorovano hitrost za dizelski motor.
Namesto prikazane razporeditve pospeševalnega motorja bi lahko kolektor TIP122 alternativno povezal z CDI enota dizelskega motorja za enako zmanjšanje števila vrtljajev, za lažje polprevodniško stanje in zanesljivejšo izvedbo obravnavanega elektronskega krmiljenja vrtljajev motorja ali vezja elektronskega regulatorja hitrosti motorja.
Kako nastaviti
Najprej odklopite stopnje IC1, IC2, tako da odstranite sledilno povezavo oddajnika s pinom 5 na IC2.
Nato se prepričajte, da sta dva 100k upora ustrezno spremenjena in nastavljena tako, da zatič št.3 IC2 generira najožji možni PWM (@ približno 5% časovna stopnja ON).
Po tem s pomočjo Nastavljivo napajanje od 0 do 12V , uporabite spremenljivo napetost na zatiču # 5 IC2 in potrdite sorazmerno naraščajoči PWM na zatiču # 3.
Ko se preskusni odsek preizkusi, je treba tahometer preveriti z uporabo znanih impulzov vrtljajev na minuto, ki ustrezajo želeni nadomestni hitrosti vrtljajev. Med prilagajanjem prednastavljene osnove BJT sledilnika oddajnika, tako da lahko njegov oddajnik ustvari vsaj 10 V ali nivo, dovolj velik, da povzroči, da PWM IC2 ustvari potrebni navor na priključenem motorju za upravljanje pedala.
Po nadaljnjem prilagajanju in eksperimentiranju lahko pričakujete, da boste dosegli zahtevani samodejni nadzor hitrosti motorja in z njim povezane obremenitve.
NADGRADNJA
Če motor zamenjamo z vzmetnim elektromagnetom, bi lahko zgornjo zasnovo poenostavili, kot je navedeno spodaj:

Elektromagnetna gred je lahko povezana s stopalko za plin za dosego predvidene samodejne regulacije števila vrtljajev motorja.
Za več možnosti glede pretvornika frekvence v napetost si oglejte Ta članek .
Prejšnja: Vezje za uporabo fitnes telovadnice s časovnikom Naprej: Polnjenje akumulatorja s Piezo Mat Circuit