Prispevek pojasnjuje metodo, ki jo je verjetno mogoče uporabiti za povečanje sposobnosti pasivnega infrardečega senzorja za zaznavanje celo statične ali pisalne človeške prisotnosti. Ta funkcija običajno ni mogoča pri običajnih PIR senzorjih.
Kako PIR zazna človeško prisotnost
Na tej spletni strani sem že razpravljal o številnih aplikacijah detektorjev gibanja, ki temeljijo na PIR, vendar za vse te aplikacije je potrebna nenehna človeška prisotnost, da lahko PIR zazna njihovo prisotnost, kar se zdi velika pomanjkljivost, ki preprečuje zaznavanje teh enot stalna ali nepremična človeška zasedenost.
Vendar ima zgoraj pojasnjena pomanjkljivost svoj razlog. Običajni PIR senzorji delujejo tako, da IR-signale iz človeškega telesa zaznajo skozi nekaj vzporednih rež na sprednji leči, njegovo notranje vezje pa se aktivira šele, ko IR-signali prečkajo te zaznavne reže ('vizije').
Prečkanje IR signalov skozi zaznavne reže omogoča vezju PIR, da informacije prevede v dva ustrezna izmenična impulza, ki se nato popravi, da ustvari sprožilno napetost na izhodnem zatiču PIR.
PIR ne more zaznati pisarniškega cilja
To pomeni, da če je vir IR negiben, modul PIR ne bo pozval, da sproži sprožilec na svojem izhodnem zatiču. To tudi pomeni, da mora IR signal iz vira nekako nadaljevati prehod skozi dane reže za zaznavanje PIR, da bo lahko zaznal dano človeško bitje znotraj območja.
Zdi se, da za to ni neposrednega ali enostavnega zdravila, ker modulov PIR za to ni mogoče interno spremeniti, kar enoti onemogoča zaznavanje mirujoče človeške prisotnosti.
Logično opazovanje pa nam pove, da če je njegov spremenljiv vir IR, ki bo morda potreben za ohranitev aktiviranega modula PIR, zakaj potem ne bi prisilil samega PIR-a v neprekinjeno gibanje namesto subjekta.
Koncept je mogoče predstaviti iz naslednje simulacije GIF, ki prikazuje nihajni PIR modul in statično človeško bitje v območju zaznavanja.

Tu lahko vidimo, kako se nihajoči PIR prilagodi problemu in se preoblikuje, kar omogoča zaznavanje celo statičnih IR predmetov.
To postane mogoče, ker modul PIR s svojim gibanjem pretvori stacionarni IR vir v neprekinjeno spreminjajoče se IR slike v svojih dveh sprejemnih režah.
Čeprav je ideja videti zapletena, jo je mogoče dejansko preprosto rešiti z uporabo počasi nihajočega PwM krmiljenega motornega kroga.
Celoten mehanizem in podrobnosti vezja bomo izvedeli v naslednjih razdelkih.
Kot smo že razpravljali, so običajni moduli PIR sposobni zaznati le premikajoče se žive predmete in ne morejo prepoznati mirujočega cilja, zaradi česar je njegova uporaba omejena le kot človeški detektor gibanja.
Za aplikacije, pri katerih je v takšnih scenarijih odkrivanje motilskih prostorov ljudi nujno, lahko običajni PIR postane neuporaben in bo morda potreboval zunanjo ureditev za nadgradnjo.
Oblikovanje PIR za odkrivanje nepremičnih tarč
V zgornjem razdelku smo izvedeli, da lahko PIR modul, namesto da bi bil v gibanju, sam premaknemo v določenem polmeru za izvajanje želenega statičnega zaznavanja cilja.
V naslednjih razdelkih se naučimo preprostega vezja, ki ga lahko uporabimo s PIR, nameščenim na majhnem enosmernem motorju za predlagana nihanja.
Gonilnik motorja s krmiljenjem PWM / flip Flop
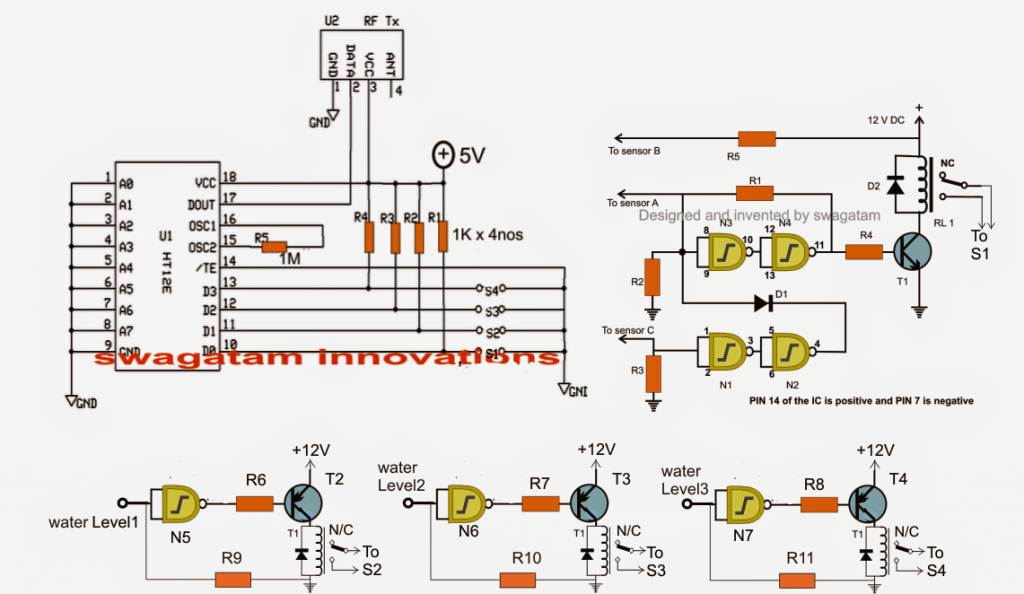
Sistem v bistvu zahteva določanje hitrosti s PWM in preklop na flip flop za motor. Naslednji diagram prikazuje, kako je mogoče te funkcije s pomočjo preprostega vezja pripisati PIR motorju:

Prikazano vezje uporablja enojno IC HEF40106 šestnajstiško obrnjeno schmitt-ovo IC, ki vključuje 6 pretvorniških NOT vrat.
Vrata N1 in N2 so konfigurirana tako, da proizvajajo nastavljiv izhod PWM, ki se napaja na vrata N4, N5, N6, ki tvorijo odbojnike.
Skupni izhod iz teh vmesnih vhodov se zaključi na vrata mosfet-a motornega gonilnika.
Vsebina PWM se nastavi s pomočjo P1, ki se končno nanese na priključen motor preko nabora relejnih kontaktov DPDT.
Ti relejni kontakti določajo smer gibanja motorja (v smeri urnega kazalca ali v nasprotni smeri urnega kazalca).
Te kontakte releja DPDT na flip flopu krmili nestabilni časovnik, konfiguriran okoli vrat N3, pri čemer kondenzator C3 / R3 določa, s kakšno hitrostjo mora rele preklopiti, da lahko motor dosledno spreminja smer vrtenja.
Zgornja zasnova omogoča motorju, da izvede zahtevano počasno nihanje in gibanje po danem radialnem območju.
Lahko se izbere C3, ki začne preklop po vsakih 5 do 6 sekundah, PWm pa se lahko prilagodi tako, da omogoča izredno počasno gibanje motorja, ker mora le zagotoviti, da reže PIR prečkajo IR signale cilja v pravočasno.
Ker pa je delovanje motorja počasno, bo treba izhod iz PIR-a vzdrževati s časovnikom zakasnitve IZKLOPA, tako da se priključena obremenitev ne izklopi in ne vklopi, medtem ko gibanje motorja izmenično preseka IR-linije iz človeške zasedenosti.
Časovnik zakasnitve
Naslednji stopnja vezja časovnika zakasnitve se lahko uporabi, kar zagotavlja, da se vsakič, ko izhod PIR ustvari zaznani impulz, se zakasnitev časovnika podaljša za 5 do 10 sekund in priključena obremenitev med postopkom nikoli ne prekine.

V zgornji nastavitvi lahko vidimo motor, ki napaja električni pogon s stopnje PWM / flip flop, kot je razloženo v prejšnjem odstavku.
Vreteno motorja je mogoče videti skupaj z vodoravno gredjo, nad katero je pritrjen PIR, tako da ko se motor premika, PIR gre skozi ustrezno spreminjajoče se radialno gibanje naprej in nazaj.
Medtem ko se inducira zgornje gibanje PIR, se IR signali z mirujočega cilja v območju zaznajo v obliki kratkih nadomestnih impulzov, ki se generirajo na izhodnem zatiču PIR, označenem z modro žico.
Ti impulzi se nanesejo na kondenzator 1000uF, ki se napolni z vsakim impulzom in zagotavlja, da BC547 med postopkom brez prekinitve ostane v prevodnem načinu.
Gonilnik releja, ki obsega stopnjo BC557, se odzove na zgornji stabilni signal kolektorja BC547 in nato rele ohranja vklopljen, dokler PIR še naprej zaznava človeško prisotnost.
Relejska obremenitev tako ostane neprekinjeno aktivirana zaradi prisotnosti mirujočega človeka v območju.
V primeru, da je človeška zasedenost odstranjena ali ko se tarča odmakne od cone, stopnja časovnika zakasnitve ohrani rele in obremenitev aktivirano v predvidenih 5 do 10 sekundah, nato pa se trajno izklopi, dokler območje še ni zajeto s potencialnim IR-oddajajočim virom.
Seznam delov
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K LONČEK
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1uF / 100V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = STIKALO DPST ALI DPDT RELE
- R3, C3, ki jih določimo s poskusi in napakami
NADGRADNJA:
Zgoraj razloženo vezje PIR za zaznavanje statične človeške prisotnosti je mogoče precej poenostaviti z uporabo vezja signalnega sekljalnika, kot je prikazano v naslednji simulaciji GIF:
Natančen pregled pokaže, da dejansko nihajno gibanje preprosto ni potrebno, motorju in rezilu sekljalnika bi lahko omogočili prosto vrtenje, tako da držite hitrost motorja na nižji ravni .
S tem bi tudi učinkovito izvedli predvideno statično zaznavanje PIR.

Video demonstracija, ki dokazuje statično zaznavanje človeka za PIR
Prejšnja: 3 razložena zvočno aktivirana stikalna vezja Naprej: 4 preprosta vezja sirene, ki jih lahko zgradite doma