V tem prispevku bomo izdelali 10-kanalno stikalo za daljinsko upravljanje, ki temelji na pasu ISM (industrijski, znanstveni in medicinski).
Uvod
The Pas ISM deluje na frekvenci 2,4 GHz, ki se lahko uporablja brez licenciranja z razumno izhodno močjo.
Predlagani projekt je brezžično stikalo za vklop / izklop za splošno uporabo, ki ga lahko uporabimo za vklop / izklop luči, ventilatorjev, gospodinjskih aparatov za avtomatizacijo stanovanj, če so dovolj samozavestni, da lahko v ta projekt vnesejo spremembe strojne ali programske opreme.
Projekt je razdeljen na dva dela: daljinski upravljalnik in sprejemnik.
Daljinski upravljalnik:
Daljinski upravljalnik je sestavljen iz 10 tipk za nadzor 10 posameznih relejev na sprejemniku. Daljinski upravljalnik upravlja 9V baterija, zaradi česar je prenosljiv.
Srce projekta je 2,4 GHz oddajniški modul NRF24L01, ki omogoča komunikacijo med dvema Arduinosoma.
Daljinski upravljalnik ima LED za potrditev.
LED za potrditev zasveti za trenutek vsakič, ko pritisnemo gumb na daljinskem upravljalniku in le, če sprejemnik sprejme oddajni signal in nato sprejemnik pošlje povratni signal nazaj na daljinski upravljalnik, da sproži LED.
Ta postopek bo zagotovil, da je ukaz za vklop / izklop daljinskega upravljalnika dosežen do cilja z vizualno potrditvijo.
V vezju daljinskega upravljalnika je na voljo stikalo za vklop / izklop za preprečevanje prekomerne izgube energije v prostem teku.
Za izdelavo daljinskega upravljalnika je priporočljiv Arduino Nano ali Arduino Pro-mini, saj je v manjši obliki, zaradi česar je prenosljiv.
Shema vezja:

Zgoraj je celoten diagram vezja za daljinski upravljalnik. Diagram povezave nožic za NRF24L01 je prav tako podan v isti shemi.
Ko končate, izklopite daljinski upravljalnik.
Prenesite datoteko knjižnice tukaj: github.com/nRF24/RF24.git
Program za daljinsko upravljanje:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int ip1 = 2
const int ip2 = 3
const int ip3 = 4
const int ip4 = 5
const int ip5 = 6
const int ip6 = 7
const int ip7 = 8
const int ip8 = A0
const int ip9 = A1
const int ip10 = A2
const int buzzer = A3
char buzzchar[32] = ''
const char constbuzzer[32] = 'buzz'
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
void setup()
{
pinMode(ip1, INPUT)
pinMode(ip2, INPUT)
pinMode(ip3, INPUT)
pinMode(ip4, INPUT)
pinMode(ip5, INPUT)
pinMode(ip6, INPUT)
pinMode(ip7, INPUT)
pinMode(ip8, INPUT)
pinMode(ip9, INPUT)
pinMode(ip10, INPUT)
pinMode(buzzer, OUTPUT)
digitalWrite(ip1, HIGH)
digitalWrite(ip2, HIGH)
digitalWrite(ip3, HIGH)
digitalWrite(ip4, HIGH)
digitalWrite(ip5, HIGH)
digitalWrite(ip6, HIGH)
digitalWrite(ip7, HIGH)
digitalWrite(ip8, HIGH)
digitalWrite(ip9, HIGH)
digitalWrite(ip10, HIGH)
radio.begin()
radio.openWritingPipe(address[1])
radio.openReadingPipe(1, address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.stopListening()
}
void loop()
{
if(digitalRead(ip1) == LOW)
{
radio.write(&button1, sizeof(button1))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip2) == LOW)
{
radio.write(&button2, sizeof(button2))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip3) == LOW)
{
radio.write(&button3, sizeof(button3))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip4) == LOW)
{
radio.write(&button4, sizeof(button4))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip5) == LOW)
{
radio.write(&button5, sizeof(button5))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip6) == LOW)
{
radio.write(&button6, sizeof(button6))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip7) == LOW)
{
radio.write(&button7, sizeof(button7))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip8) == LOW)
{
radio.write(&button8, sizeof(button8))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip9) == LOW)
{
radio.write(&button9, sizeof(button9))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip10) == LOW)
{
radio.write(&button10, sizeof(button10))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
}
//-----Program Developed by R.Girish----//
S tem se zaključi vezje daljinskega upravljalnika.
Sprejemnik:
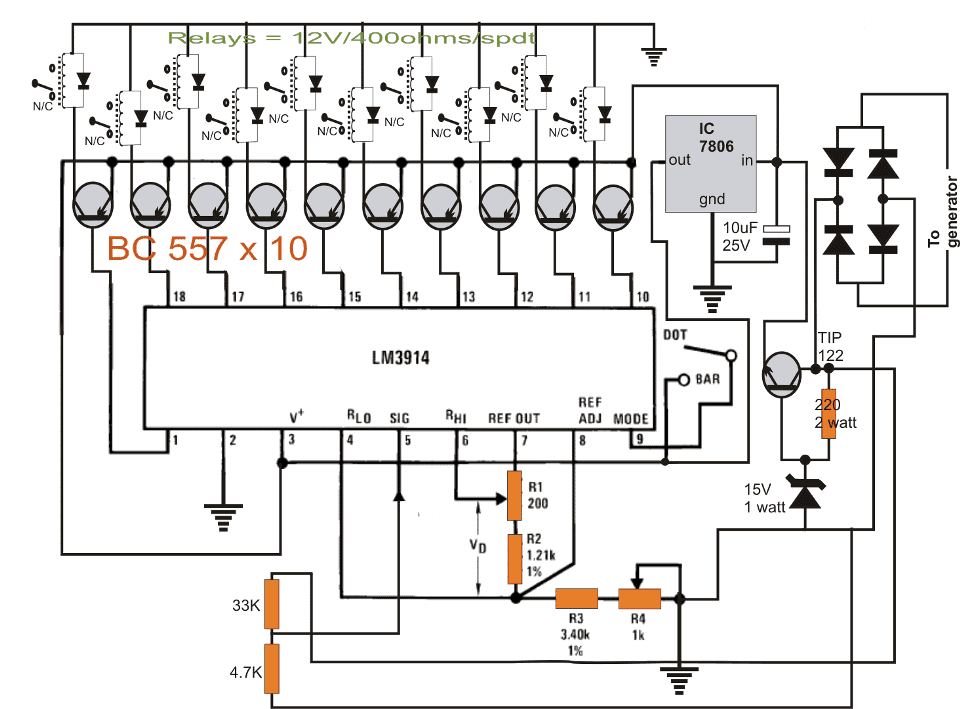
Sprejemno vezje je sestavljeno iz Arduina, ki je lahko po vaši izbiri, 10 uporov, ki omejujejo tok 330 ohmov, 10 tranzistorjev in 10 relejev tvori izhodno stopnjo.
Na vsakem od 10 izhodnih zatičev Arduino je prek upora in tranzistorja priključen na 10 relejev.
Prepričajte se, da lahko vaše napajanje zagotavlja vsaj 1A toka, ki je potreben za delovanje več relejev hkrati.
Modul oddajnika 2,4 GHz NRF24L01 zagotavlja komunikacijo med daljinskim upravljalnikom.
Shema vezja:

Če ste zmedeni s shemo ožičenja med Arduino in modulom NRF24L01, si oglejte tabelo poleg sheme, enako je tudi za vezje daljinskega upravljalnika.
Izhodno zaporedje in izhodni zatiči so naslednji:
PIN za Arduino - izhodno zaporedje
PIN 2 - IZHOD 1
PIN 3 - IZHOD 2
PIN 4 - IZHOD 3
PIN 5 - IZHOD 4
PIN 6 - IZHOD 5
PIN 7 - IZHOD 6
PIN 8 - IZHOD 7
PIN A0 - IZHOD 8
PIN A1 - IZHOD 9
PIN A2 - IZHOD 10
Izhodna stopnja:

Izhod je za poenostavitev diagrama prikazan z dvema izhodnima stopnjama. Če uporabljate vseh 10 kanalov, ga morate razširiti na deset.
Program za sprejemnik:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int op1 = 2
const int op2 = 3
const int op3 = 4
const int op4 = 5
const int op5 = 6
const int op6 = 7
const int op7 = 8
const int op8 = A0
const int op9 = A1
const int op10 = A2
const char buzzer[32] = 'buzz'
char buttonstate[32] = ''
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
boolean status1 = false
boolean status2 = false
boolean status3 = false
boolean status4 = false
boolean status5 = false
boolean status6 = false
boolean status7 = false
boolean status8 = false
boolean status9 = false
boolean status10 = false
void setup()
{
Serial.begin(9600)
pinMode(op1, OUTPUT)
pinMode(op2, OUTPUT)
pinMode(op3, OUTPUT)
pinMode(op4, OUTPUT)
pinMode(op5, OUTPUT)
pinMode(op6, OUTPUT)
pinMode(op7, OUTPUT)
pinMode(op8, OUTPUT)
pinMode(op9, OUTPUT)
pinMode(op10, OUTPUT)
radio.begin()
radio.openReadingPipe(1, address[1])
radio.openWritingPipe(address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.startListening()
}
void loop()
{
while(!radio.available())
radio.read(&buttonstate, sizeof(buttonstate))
Serial.println(buttonstate)
if((strcmp(buttonstate,button1) == 0) && status1 == false)
{
digitalWrite(op1, HIGH)
status1 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button1) == 0) && status1 == true)
{
digitalWrite(op1, LOW)
status1 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == false)
{
digitalWrite(op2, HIGH)
status2 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == true)
{
digitalWrite(op2, LOW)
status2 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == false)
{
digitalWrite(op3, HIGH)
status3 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == true)
{
digitalWrite(op3, LOW)
status3 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == false)
{
digitalWrite(op4, HIGH)
status4 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == true)
{
digitalWrite(op4, LOW)
status4 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == false)
{
digitalWrite(op5, HIGH)
status5 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == true)
{
digitalWrite(op5, LOW)
status5 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == false)
{
digitalWrite(op6, HIGH)
status6 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == true)
{
digitalWrite(op6, LOW)
status6 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == false)
{
digitalWrite(op7, HIGH)
status7 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == true)
{
digitalWrite(op7, LOW)
status7 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == false)
{
digitalWrite(op8, HIGH)
status8 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == true)
{
digitalWrite(op8, LOW)
status8 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == false)
{
digitalWrite(op9, HIGH)
status9 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == true)
{
digitalWrite(op9, LOW)
status9 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == false)
{
digitalWrite(op10, HIGH)
status10 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == true)
{
digitalWrite(op10, LOW)
status10 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
}
//-----Program Developed by R.Girish----//
To zaključuje sprejemnik.
Ima teoretični domet 100 metrov, praktično lahko deluje približno 30 metrov in več, lahko se razlikuje glede na trdne ovire med daljincem in sprejemnikom.
Kako voditi ta projekt:
• Najprej vklopite sprejemnik in nato daljinski upravljalnik.
• Naenkrat pritisnite kateri koli gumb na daljinskem upravljalniku.
• Če pritisnete prvi gumb, se sproži ustrezen izhod, tj. Izhod 1 se vklopi. Če znova pritisnete isti gumb na daljinskem upravljalniku, bo izklopil izhod 1 na sprejemniku.
• Velja za vse gumbe in 10 izhodov.
• Po uporabi izklopite daljinski upravljalnik.
Če imate dodatna vprašanja v zvezi z zgoraj omenjenim 10-kanalnim stikalom za daljinsko upravljanje z 2,4 GHz, jih izrazite v komentarju.
Prejšnja: Vezje generatorja signala PWM Arduino Naprej: Kako zagnati servo motor z IC 555